| 1 ����
�������ؼ��g��һ�N����Ӌ��C���Cе�ӹ��^���и��N������Ϣ�M�Д��ֻ��\��̎������ͨ�^�����ܵ��ӆ�Ԫ���Cе���И����M���Ԅӻ����Ƶĸ��¼��g���F���Cе�ӹ��I�������Ի������ɻ������ܻ�����lչ�������һ�����ؼ��g�ͱ��菊�{�����_��ʽ�����ܻ����W�j��������[1]�����IJ�������̎�����������ܼ����·���о��_�l���ܲ��M늙C���ƿ���
2 ϵ�y���w�Y���OӋ
����ͨ�^�����M늙C�������P�I���g�M�з������о��ͱ��^�����C�χ������\�ӿ������aƷ���ܻ������ɻ����_�Ż��İlչڅ�ݣ��҂�����IJ��M늙C�\�ӿ��������w�Y����D1��ʾ��
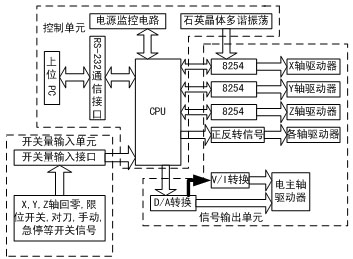
�D1 ϵ�y���w�Y��
����
3 ϵ�yӲ���·�OӋ
����3.1 �}�_���l�·�OӋ
������ϵ�y����Ҫ���ƌ���鲽�M늙C�����M늙C��һ�N����}�_�D�����λ�ƵĈ��ЙC������ˮa������ϵ�yҪ��IJ��M늙C���}�_������ϵ�y�OӋ�е��P�I����ϵ�y���}�_���l�·�ɈD2��ʾ�������·����3Ƭ8254���a��X��Y��Z�����S�����}�_��̖���b��Y��Z�S���·�cX�S��ͬ����ˈD��ֻ��ʾ��X�S�}�_��ݔ�����·ԭ����
����Inte18254�ǿɾ��̶��r/Ӌ������Ƭ�Ȱ���3������ͨ����ÿ��ͨ�����鹦����ͬ��16λӋ������ÿ��Ӌ�����Ĺ�����ʽ��Ӌ���L�ȷքe��ܛ�������x��8254��8253�ĸ��M�ͣ�������ʽ�����_�c8253��ȫ��ͬ��8253Ӌ���l�ʞ�2.6MHz��8254��Ӌ���l�ʄt���ߣ����_��6MHz����ϵ�y�x��8254�����}�_���l�·������оƬ��
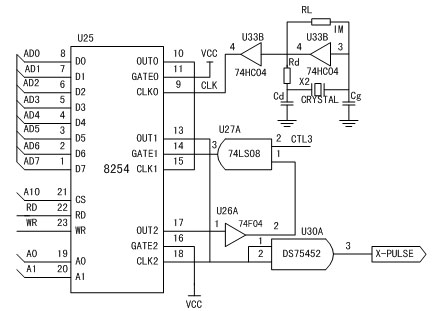
�D2 �}�_���l�·�D
����3.2 RS-232ͨ�Žӿ��·�OӋ
�����چ�Ƭ�Cϵ�y��ͨ���У�RS-232��RS-485�˜ʿ������������졣����ʹ�\�ӿ��������m�÷������ӏV�������PC�ĬF�нӿڣ��҂��x��RS-232�˜ʿ����팍�F��������PC��ͨ�ţ���ӿ��·��D3��ʾ���ڈD3�У��x��MAX232����ϵ�y��ͨ�Žӿ�оƬ��MAX232��MAXIM��˾���a�ĵ��ġ����Դ�pRS-232�l��/���հl�����m���ڸ��NEIA-232E��V.28/V.24��ͨ�Žӿڡ�MAX232оƬ����ݔ���+5V�Դ׃�Q��RS-232ݔ���ƽ����ġ�10V늉������Բ��ô�оƬ�ӿڵĴ���ͨ��ϵ�yֻҪ��һ��+5V�Դ�Ϳ��ԡ�
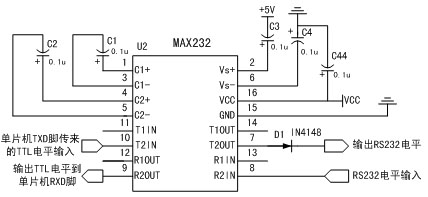
�D3 ͨ�Žӿ��·
����MAX232�����Ҫ4��늽����C1��C2��C3��C4�ǃȲ��Դ�D�Q������ݣ���ȡֵ����0.1��F/25V��C44��0.1��F��ȥ����ݡ�MAX232�����_T1IN��T2IN��R1OUT��R2OUT���TTL/CMOS�ƽ�����_��
�������_T1OUT��T2OUT��R1IN��R2IN���RS-232C�ƽ�����_�����TTL/CMOS�ƽ��T1IN��T2IN���_����MCS-51�Ĵ��аl�����_TXD��R1OUT��R2OUT����MCS-51�Ĵ��н������_RxD���c֮������RS-232C�ƽ��T1OUT��T2OUT����PC�C�Ľ��ն�RD��R1IN��R2IN����PC�C�İl�Ͷˡ�
����3.3 D/A�D�Q�cV/I�D�Q�·�OӋ
�������\�ӿ�������Ҫ������S���D���M�п��ƣ�������S�Ŀ���ͨ�^�������팍�F������S��������ݔ���늉�������Ĵ�С���_�����S���D�٣����ϵ�y��Ҫݔ��0��5V��늉���0��20mA���������회�ϵ�y̎���^�Ĕ�������D/A�D�Q׃��ģ�M��ݔ��������������D/A�D�Q��Ҫ��DAC0832оƬ���F��DAC0832��8λ̎���������͔�/ģ�D�Q��оƬ����DAC0830ϵ�е�һ�N��DAC0832�c�C�ӿڷ��㣬���Գ������̎�����Ŀ����������F��D/A�D�Q�Ŀ��ƣ�����ڌ��H�еõ��ˏV���đ��á�
������ͬ������S������ݔ�����̖�в�ͬ��Ҫ���е���Ҫ0��5V��늉���̖���е���Ҫ0��20mV�������̖������҂�ͬ���OӋ��V/I�D�Q�·��ʹϵ�y�߂��������̖��ݔ����������ϵ�y���m���ԡ�
����3.4 �_�P��̖ݔ���·�OӋ
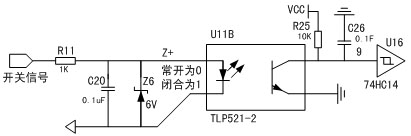
�����ڲ��M늙C�\���^���У������ÙCеʽ�_�P����_�P�����_�P��̖ݔ���·��ͨ�^�_�P���]�ϻ���_�����ƽ����ʽ��ӳ���M늙C�Ĺ��r���@����X��Y��Z�S��λ;�ӹ��^���Ќ�����X��Y��Z�S늙C�Ļ�������ȵ�[2-3]��
���������_�P�ęCеʽ�OӋ���|�c�]�ϻ���_�r���ЙCе���ӣ���ʹݔ����̖���γ��F��ʎ����ԓ��̖ݔ�뵽��������Ӌ�����У�������e�`��Ӌ��������ϵ�y���ƻ�y���_�P����ݔ��ɔ_��ϵ�y�OӋ�п��^���ڵĆ��}������ګ@���_�P��̖���҂���회��_�P��̖�M��̎����ʹ��ɞ��Ƭ�C�����R�e�Ĕ�����̖��������������ķ�����ϵ�y���ṩ��12·���_�P��̖�ӿڣ���λ�_�P��̖̎����D4��ʾ��
|



