����DSPģ�����Ƶ��_�P����늙C�{��ϵ�y�OӋ
�ν��룬����r��������
(������ͨ��W���������710049)
ժҪ���x��DsPTMs320F2812������оƬ���OӋ������8��6�O75 kw�_�P����늙C�{��ϵ�y(sRD)��ᘌ��_�P����늙C(sRM)���ڵķǾ��Ԇ��}�����á�P1+ģ�����p�]�h�㷨�քe��늙C���@�M������D���M�п��ơ����Y��������ԓ���Ʒ������ڷǾ��ԇ��ص�sRM���кܺõĿ���Ч����
�P�I�~���_�P����늄әC���Ǿ��ԣ�������̖̎������ģ������
O����
�_�P����늙C(sRM)��80������ڰlչ����������늙C�����������Ӽ��g����Ӽ��g��늙C���Ƽ��g��һ�w������͵ęC�һ�w���aƷ���_�P����늙C�{��ϵ�y(sRD)�cֱ���{��ϵ�y�ͮ���늄әC׃�l�{��ϵ�y����^�����нY�����Ρ��ɱ��͡�Ч�ʸߡ������`��������С�������D�ش��m���ڐ��ӭh���ȃ��c����˽�����ڠ����\ݔ��ͨ�ù��I������������I��õ��ˏV�����á�����sRM���Ї��صķǾ��Լ�׃�Y����׃�������c���y�Խ������_�Ĕ��Wģ�磬���ڲ�ͬ�Ŀ��Ʋ������䅢�����Y������׃���ģ���˹̶�������PID���Ʒ�ʽ�y�ԫ@������Ŀ������ܡ�ᘌ��������}�����İѸ�����DsP�͡�ģ��+PI�����p�]�h�����㷨��Y�ϣ��OӋ������8��6�OsRM�Y��ϵ�y��һ���̶��Ͻ�Q��sRM�Ǿ��Ԏ�����һϵ�І��}��
1ϵ�y�Y���c���Ʋ���
sRDϵ�y��Ҫ��sRM������׃�Q�������������z�y��Ԫ�ĴֽM�ɡ�����׃�Q����sRDϵ�y������ݔ���P�I���֣�������@�M���_�P���ã���Ӱ�ϵ�y���܃r��ȵ���Ҫ���أ���������sRDϵ�y�ĺ��IJ��֣����������D�ٵ��{���������ܵĺÉ�ֱ��Ӱ�늙C���\�����ܣ��z�y��Ԫ��λ�Ùz�y������z�y�h���M�ɣ��ṩ�D�˵�λ����Ϣ�Ķ��_�������@�M���_ͨ�c�P�࣬�ṩ�����Ϣ�Բ�ȡ�����ı��o��ʩ��ֹ�^�����
sRDϵ�y����Ҫ���������D��ֵ��o��������Ҫ��sRM���D�����ԄӸ��S�o�������鱣�C���õĜY�����ܣ�sRD�����p�]�h����ϵ�y����h���D�٭h������ģ���㷨���ȭh������h�����ý���PI�㷨��sRDϵ�y����Ҫ���Ʒ�ʽ�У��Ƕ�λ�ÿ��ơ�����ز����ƺ�늉�PwM���ơ���ϵ�y����늉�PwM���ƣ������c��ͨ�^PwM��ʽ�{���@�M��늉�ƽ��ֵ���g���{���������^�˵��@�M������Ķ����FsRM�{�١������������D���{��ϵ�y�ĸ����\�У����m���ڵ����\�У����ҿ�ؓ�d�_�ӵĄӑB푑��죬�����������^���ס�
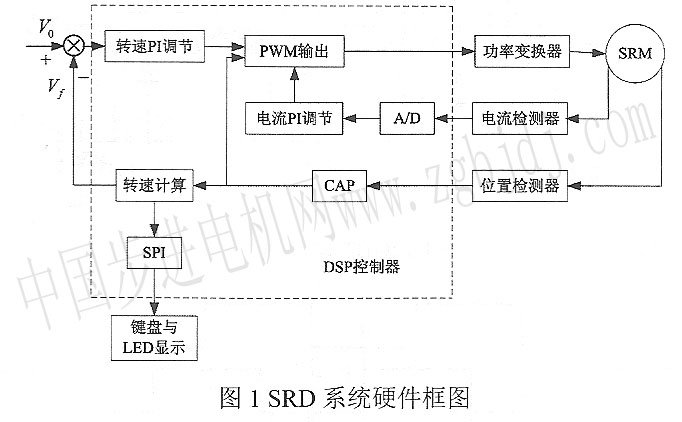
2ϵ�yӲ���OӋ
�������OӋ�Ļ���TMs320F2812��sRDӲ�����w�����Dl��ʾ��TMs320F2812��TI��˾�Ƴ���****һ��DSPоƬ��Ҳ��Ŀǰ���H�Ј���****�M������******��32λ���c13DSPоƬ����ָ��̎���ٶȿ��_150M��s���D�У�̓����ȵIJ��֞�TMS320F2812��ϵ�y�����п��ƭh������������h���ơ��D�٭h���ơ�늙C�Q���ȫ����ܛ����ɣ�DsPֱ��ݔ��߉�ƽ�͵�PwM������̖�ӹ���׃�Q���������Ķ���sRM�M��������ٶȿ��ơ����������̖���ɻ�������������y�õģ���̖���^̎��������_TMS320F2812�ȵ�ADc���D�Q�锵��������������h���ٶȷ�����̖��λ�Â������@ȡ�����^�{��������DSP��cAP��Ԫ���Ķ��õ�늙C���ٶȺͷ����I�F�ٶȵ��]�h���ơ�
2 1����׃�Q���OӋ
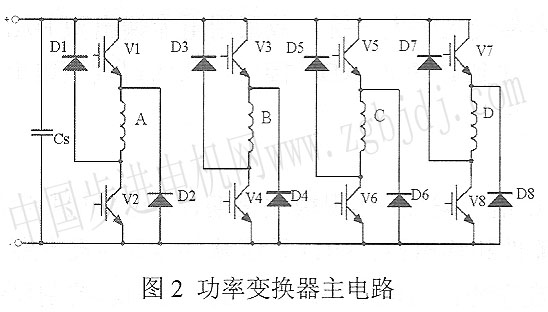
�����S�·���ò����Q����·��ʹ��늙C��ÿһ���@�M�܉������ƣ�****�ȵp�ٸ�����P�����C늙C���ચ���������˳�Ҏ���·�ϡ���Y�����F�ēQ��ֱͨ�F�����늙C���\�пɿ��ԡ������Q����·���ؓ�Y����D2��ʾ��
�P�����_�P�������x���]���^�����p�O���w��(IGBT)���й��ʓp��С���_�P�ٶȿ졢���·���Σ����Ҽ���M0sFET��ݔ���迹��GTRͨ�B͉����͵ă��c�����x�������T����˾���a��300A��1200v����̖��sKM300GBl23D��IGBT�������·�_�P��
lGBT�����x���ձ���ʿ��˾��lGBT���ø�������ģ�KExB841������������400A��600V���»�300A��1200v���µ�IGBT�������·��̖���t�r�g�����^1 ��s��****�����l�ʿ��_40kHz����ֻ���ⲿ�ṩһ��+20v�Ć��Դ���Ȳ��Լ��a��+15v(�_ͨ)��һ5v(�P��)����늉���ģ�K���ø��ٹ�����x�����ж�·���o�������P��ܣ�����ϵ�y���^�m�á�IGBT���·��D3��ʾ��
2 2�D��λ�Ùz�y
�D��λ����̖��Ҫ�����Ѓɂ���һ�Ǿ��_ָʾ�����c�D������λ���Pϵ�����nj��rӋ��늙C�D�١����IJ��õ�λ |