����³����(q��)��(d��ng)���|��B(t��i)�о�
ժҪ�����R�_(d��)���|����Ġ�B(t��i)ֱ��Ӱ푳��R�_(d��)���(q��)��(d��ng)���ԡ��������Ƶ�ģ�M���R�_(d��)���ӱ���һ�|(zh��)�c(di��n)�E�A���(d��ng)�ij����(q��)��(d��ng)ģ�M��(sh��)�(y��n)�b�ã��о��˽��|�A(y��)����������(l��)늉�����նȌ�(du��)�����(q��)��(d��ng)Ħ���(q��)��(d��ng)�^�cĦ��Ƭ���|��B(t��i)��Ӱ�����Y(ji��)���������S�����|�A(y��)��������նȵ����ӣ�Ħ���(q��)��(d��ng)�^��Ħ��Ƭ�Ľ��|�r(sh��)�g׃�L������(l��)늉���(du��)Ħ���(q��)��(d��ng)�^��Ħ��Ƭ�Ľ��|Ч��Ӱ��^С������ղ�ճ�Y(ji��)�������Ӽ��Ҹ����ĜpС������Ħ���(q��)��(d��ng)�^��Ħ��Ƭ�Ľ��|�r(sh��)�g׃�L����Ҫԭ����
�P(gu��n)�I�~��������Ħ���(q��)��(d��ng)�����|��B(t��i)
O����
�в��ͳ��R�_(d��)���ӱ���ijһ�|(zh��)�c(di��n)���^��B(t��i)���������Ը��l�E�A���(d��ng)������ͬ���|(zh��)�c(di��n)��ͬһ�r(sh��)��̎�ڙE�A���(d��ng)܉�E�IJ�ͬλ�ã��Ҹ��c(di��n)λ���B�m(x��)���ڶ��ӱ����γ��˸��l�����в��������|Ħ�����(q��)��(d��ng)�D(zhu��n)���D(zhu��n)��(d��ng)������(du��)���R�_(d��)���ӱ���һ��(g��)�|(zh��)�c(di��n)��һ��(g��)���ڃ�(n��i)���^Ħ���(q��)��(d��ng)��B(t��i)���о��������������������в��ͳ��R�_(d��)�ĺ��^Ħ���(q��)��(d��ng)�C(j��)����
��1988��Kurosawa��ueha�ͷ����˳��R�_(d��)�����D(zhu��n)�ӵĽ��|�������ԣ����D(zhu��n)�ӵķ����������Խ��|ģ��P J��Maen0��������Ԫ�����о��˳��R�_(d��)�����D(zhu��n)���g���|��B(t��i)�������ָ��ֻ�аѱ���ͨĦ��ԇ�(y��n)�y(c��)�õĸ��͵Ą�(d��ng)���oĦ��ϵ��(sh��)������Փ��ʽ�У����ܵõ��c�����(q��)��(d��ng)ԇ�(y��n)�Y(ji��)��һ�µĽY(ji��)Փ��0��Adachi�ȏČ�(sh��)�(y��n)����Փ�ăɂ�(g��)�����о��˳����(q��)��(d��ng)r��Ħ���C(j��)����0��storck��wallaschek���о�I=r���R�_(d��)�⡢�D(zhu��n)��֮�g���|�ӵ������Ԍ�(du��)���R�_(d��)���Ե�Ӱ푣������R�_(d��)���O(sh��)Ӌ(j��)������Ҫ��ָ��(d��o)���x0 J���_��ϼ���о��˽��|�A(y��)���o���̓��೬�����(d��ng)�ļ���(l��)늉����ֵ֮�Ȍ�(du��)�����(q��)��(d��ng)r��Ħ�����Ե�Ӱ��_6J��������ǰ�ڹ����У���(du��)�����(q��)��(d��ng)�еĴ�ֱ�������(d��ng)�ĜpĦ�����M(j��n)��1r��Փ�о����ó���ֱ���������(d��ng)�nj�(d��o)�³����(q��)��(d��ng)��(d��ng)Ħ��ϵ��(sh��)���͵�ԭ��l|J�����FӢ�Ȝy(c��)ԇ�˴���c������в����R�_(d��)���D(zhu��n)r���|��B(t��i)���J(r��n)����F���ڵ��Ҹ���ʹ�����D(zhu��n)���g���x�r(sh��)�g������µ��L��j����ǰ��(du��)����³����(q��)��(d��ng)���|��B(t��i)�о���(b��o)���^�٣����ˣ��������(du��)�����(q��)��(d��ng)���|��B(t��i)�M(j��n)��ϵ�y(t��ng)������о��@���Ȟ���Ҫ��
���x�����īI(xi��n)9�����늽��|�������Ƴ����(q��)��(d��ng)ģ�M��(sh��)�(y��n)�b�ã��g�Ӝy(c��)�������(q��)��(d��ng)Ħ���(q��)��(d��ng)�^�cĦ��Ƭ�Č�(sh��)�H���|��B(t��i)���Y(ji��)�Ϝy(c��)�õĽ��|����Ľ��|���ΈD���������|�A(y��)����������(l��)�
������նȌ�(du��)�����(q��)��(d��ng)���Ե�Ӱ푣��齨�����R�_(d��)Ħ��������(q��)��(d��ng)ģ�ͺͷ������R�_(d��)Ħ��ĥ�pҎ(gu��)���ṩԇ�(y��n)����(j��)����Փָ��(d��o)��
1ԇ�(y��n)����
1 1��(sh��)�(y��n)�b��
����ģ�M�������ij�c(di��n)�ęE�A���(d��ng)Ч�����������īI(xi��n)10����ď�(f��)�ϳ������(d��ng)�w����D1a1��ʾ��ԓ��(f��)�ϳ������(d��ng)�w��ˮƽ���(d��ng)�ʹ�ֱ���(d��ng)�քe�����ÃɽM����մ�Ƭ�a(ch��n)������(d��ng)��ɽM
����մ�Ƭ�քeʩ��ͬһ�l�ʡ���λ���90�����(q��)��(d��ng)늉�����r(sh��)��ԓ�������(d��ng)�w��Ħ���(q��)��(d��ng)�^��ǰ���c(di��n)�����l�E�A�\(y��n)��(d��ng)�����D1a)��ʾ�������(d��ng)�w���b�����Ƶ�ģ�M�����(q��)��(d��ng)Ħ��ԇ�(y��n)�_(t��i)(�D1b)�ϣ��É�늾��wʽ��(d��ng)�B(t��i)���������y(c��)�����|����Ą�(d��ng)�B(t��i)���|�������(q��)��(d��ng)����ͨ�^�y(c��)��R2�ɶ˵�늉����Σ��g�Ӝy(c��)�����|����Ľ��|��B(t��i)����(sh��)�(y��n)�b���܉�ظ��QĦ��������׃����늉����A(y��)���������У��A(y��)���������(d��ng)�w���غ�ԇ�(y��n)�b��픶˵����a�ṩ���y(c��)����(sh��)��(j��)��Ӌ(j��)��C(j��)�ɼ���̎����ԇ�(y��n)���õ�Ħ���(q��)��(d��ng)�^��Ħ��Ƭ���Ͼ������~����ԇ�(y��n)�_(t��i)�������ǻ��(n��i)����՜y(c��)ԇϵ�y(t��ng)������ǻ����տ���ϵ�y(t��ng)�����R�_(d��)����ϵ�y(t��ng)�ȽM�ɡ�ͨ�^�{(di��o)��(ji��)��խ����ϵ�y(t��ng)����ʹ����҃�(n��i)����ն��_(d��)��ԇ�(y��n)Ҫ��ķ�����
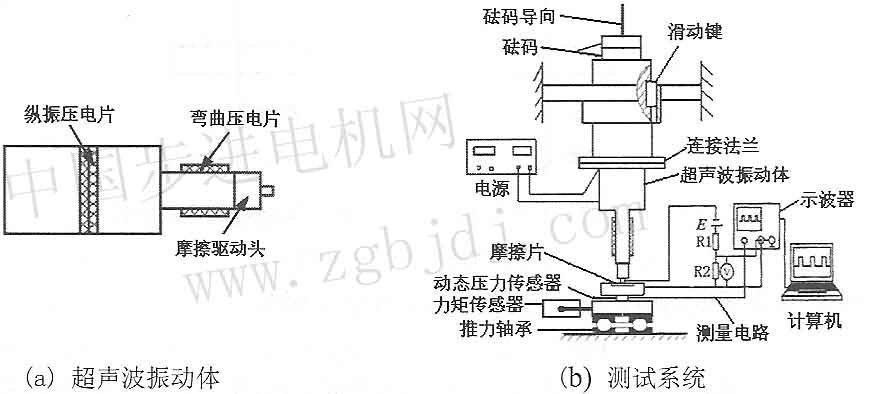
�D1�����(q��)��(d��ng)ģ�M��(sh��)�(y��n)�_(t��i)ʾ��ͬ
1 2ԇ�(y��n)
|



