����B00st׃�Q�ğoˢֱ��늄��i�����о�
�R���䣬��̣��T��
(�������I��W��ꃃ�����710129)
ժҪ�����½�B�˷N�ɟoˢֱ��늄әC���U���әC���M�ɵ�늄��i����ϵ�y��ϵ�y����λ�á��ٶȡ�������]�h���ƣ�����ᘌ����̌��`���i�N�Σ����^�̿����������^�����������늄��i�o�����������Ć��}������Boost�·���F����늉�����ʹ늙C��������(���D����)�^�̕r�g�����������Ķ����F�i�NѸ�ٵİΣ��������Փ�Ľ�����ϵ�y�Ă��f��������������ϵ�y�M���˷��档�Y��������ԓ����ϵ�y�����^����A�S푑����Ժ��^�ߵľ��ȡ�
�P�I�~���oˢֱ��늄әC��늄��i��B00st�·������
0����
늄��iͨ��������Ҫ�ԄӶ�λ���i�o���p�����Ҿ���һ��������ֱ���\�ӈ���[1]����ֱ���C��������������ܡ��w�����әC�����i���b�õȡ��oˢֱ��늄әC(Brushless DC Motor�����QBLDCM)�����w�eС�������p�����ƾ��ȸߵȃ��c�V��������܇�v�ӡ��C���˵��I��ǰ�����Ⱥ��պ����I�����в���ֱ��늄�����ϵ�y���������������w�C߀������ˢֱ��늙C������ЙC�������˝M���w�C늄��i���ӵĸ��������˷���Δ��l���������Dʹ��ˢ늙C�ˢ�������ͣ����������w�C�����b��ʧ�`�Ȇ��}�����Ľ�B��һ�N����BLDCM���U���әC���M�ɵ�늄��i����ϵ�y��ԓ늄��i�ßoˢֱ��늙C���ƿ˷�����ˢֱ��늙C�IJ��㣬�����ϵ�y�Ŀɿ��ԣ��m������һ���w�C�`�����ӵ�����
ᘌ�ϵ�y��늄��i�\�����Ե�Ҫ����ھ�BLDCM�Ĺ������ԣ�����Boost�·���F�i�N����İΣ����_������������Matlab������ϵ�y�M�з��棬�Y����C��ģ�͵����_�Լ�����ϵ�y����Ч�ԡ�ͬ�rҲ����ԓ늄��i����ϵ�y�Ɍ��F�i�N�Ŀ��ٰΣ������ӺͶ�λ���ƣ��M��늙C�l���������D��Ҫ���Ҿ����^���푑����ԡ�
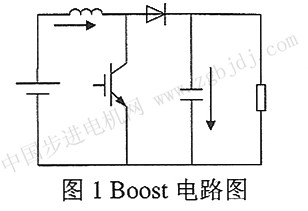
1 B005t׃�Q
Boost�·��һ�NDC-DC׃�Q�·�������w�eС���Y�����Ρ�׃�QЧ�ʸߵȃ��c��������ؓ��·��D1��ʾ��
Boost׃�Q���ɹ����_�PS������늸�L���m�����O��VD���V�����c��ؓ�d���R���Դ늉�Uin���M�ɡ���S̎��ͨ�B�r���ԴUin��늸�L��늣������������㶨��il��ͬ�r���C�ϵ�늉���ؓ�dR��늣�����c��ֵ�ܴ�������ݔ��늉�u�����ֵ����s̎�ڔ��B�r��Uin��L��ͬ�����C��늣�����ؓ�d���ǹ�����[2-3]���OD��ռ�ձ�(��ͨ��)��ݔ��늉�U��������ʽӋ��:
ʽ(1)�е�D��l��ݔ��늉�U�������Դ늉�Uin�ʷQ�������ز��·�����H�����^���У������ⲿ�Դ�Ĺ���늉�Uin��Boost�·����������oˢ늙C��׃����늙C�D�ӡ�
���˿˷����������i�������غϲ���������ɵ��^��������������i�N�Σ������^��Ć��}������Boost�����·�ڲ�ͬ��B�����늙C����늉���ʹ늙C˲�gݔ�����������(���D)���أ������i�N�a��С�\�Ӻ����ڼ������ĜpС��늙CѸ�ٹ�����������B��ֱ����λ������λ��(��ȫ�����γ�)��Boost�·���������ɂ�������B��(1)�]�i��B�����i�N���������i������]�i�����r�����^����������ã�����Boost�·���늙C����늉���(2)�_�i��B����늙C����������늉����Ӻ�һ���r�g���i�N�]���\�Ӱl�����˕r��Boost�·����늙C����늉���
2늄��iģ�͵ĵĽ���
2��1���]�h���Ʋ���
늄��i����ϵ�y����λ�á��ٶȡ�������]�h�Ŀ��Ʋ��ԡ�����ͨPID�������У�����e�֭h��Ŀ���Ǟ��������o���߿��ƾ��ȡ������^�̵Ć��ӡ��Y�����������p�O���r���̕r�g��ϵ�yݔ���кܴ�ƫ������PID�\��ķe�ַe�ۣ���ʹ����ϵ�y�^��ij��{����������h��푑��ٶȺܿ죬��˲��÷e�ַ��x��PI�����㷨�����]�������֭h�����Ա��������ӵļ����������h����ʎ[4]���@�ӼȜpС������h�ij��{�����֜pС�o�B�`�����˿��ƾ��ȡ�PID����������̖������ɸ���ϵ�y�ӑB���ԣ���Ҳ�������M���l�ɔ_�������㷨�м����ͨ�V������ʹϵ�y���ܵõ����ơ�������ϵ�y�У�λ�ã��ٶȭh�{�������ò���ȫ�ֵ�PI�����㷨���Կ˷��`��_��ͻ׃�r�����ɵIJ��㡣
2.2�U����
�U�������U��݆�M�ɣ������ڂ��f���g���e90 �� |