С�ͳ���늙C�����칤ˇ
ժҪ�������˸��NС�ͳ���늙C���әC������ˇ����������ָ�ˡ�Ԕ��ӑՓ��늙C���칤ˇ�Б�ע���һЩ�P�I���}����ͨ�^��늙C�ă����迹���ԵČ��ȣ������˼ӹ���ˇ��߅��l���Լ��b�䰲�bʹ�õ����칤ˇ����ͬ�ߴ�늙C���ȵ�Ӱ푡�
�P�I�~��С�ͳ���늙C�����칤ˇ���迹����
O����
1980���ձ��W��ָ�������ɹ����������һ�_���ԝM�㌍�Hʹ��Ҫ��ij���늙C����30������N��ͺͽY���ij���늙C����ر����ƣ�������ָ��ҲԽ��Խ�ӽ����H���̑��õ���Ҫ������늙C�lչҲ���v�ˏĴ�С����С�͵��͵�һ���^�̡��S����әCеϵ�y(MEMs)�_�l�����룬������әCеϵ�y���P�I���в�����늙C������Խ��Խ�ܵ��˂����Pע������늙C������ߴ�ĜpС�����ʼ����½����D�QЧ�ʽ��ͣ����й����w�e�ȴY�������`��Ҹ��ܝM��MEMs��늙C��ݔ������Ҫ������c��ʹ��ɞ�****�lչ���������������C�����ͳ���늙C�ں��պ��졢�댧�w���I���t����е���I���ѽ�����늴�늙C���o�늙C�Ȳ�˾��������â衣
1С�ͳ���늙C�����
Ŀǰ��������С�ͳ���늙C��Ҫ������ڹ���w�ϳ��e��Ĥ�ij���늙C���ڽ����ϳ��e��Ĥ�ij������մɉK�w�Y���ij���늙C��1992����ʡ�����WԺAnita M��Flynn����2 2���2 2mm�ĵ����象Ĥ�ϳ��e20nm��Ģ�ӣ�Ȼ����e460nm��Pt�������늘O���������zһ���z������PzT��Ĥ�����w��Ĥ����플�늘O������������
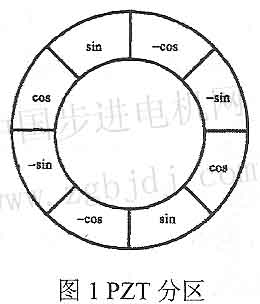
������늙C�����ӵ��⏽��2�裬�ȏ���l 2 mm��ƽ��ȵ�늘O�օ^��D1��ʾ��ÿƬ늘O���l��l�Ȳ��L���v����ͨ�^ʩ�ӈD1��ʾ��λ�ļ���늉����ڱ�Ĥ��ȿ��Լ��l���ɂ����L
���в����Ķ��Ƅӷ����ڱ�Ĥ���ϵ��R�D�ӡ�늙C���D�ٷ�����100��3��)()r��min��Ic��ˇ�������늙C�ߴ�С������늙C�c�ӿ����·�ܺõļ�������������ˇ�^���^���s����
��Ĥ���ӕr늈��c����������φ��}�o��Փ���������˺ܴ���y�ȣ�늙C��ݔ�����ܺ��y���Ա��C��
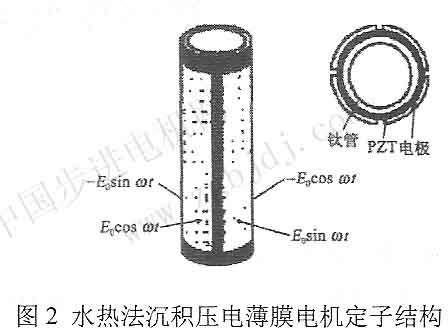
��Ĥ����մ�늙C���ڽ��ٻ��w�ı�����e�Љ�늱�Ĥ����һ̑B����늙C���ձ���С�ͳ���늙C���о��͑���ʼ�K̎������****��λ��1998��|����WT|akeshi Morita����ˮ�ᷨ�ڽ����w������e��늱�Ĥ�ķ������Ƴ��N�����ܵ��ͳ�늙C���䉺����Ӳ���PzT��Ĥ�Ƴɣ����ڱ�Ĥ������渲�w���Ă�늘O���Y����D2���90���Ľ�׃늉������g�ӵء�����PzT��d3IЧ���������ăɲ����մɹ�ͬ���l���������w��һ������ď��ɂ���λ�Ϳ��g�϶����90���ď���ĺϳ�
ʹ�����γɓu�^�\�ӣ����������|�c�\��܉�E��E�A�\�ӣ��M�����D�ӡ�늙C����ֱ��2 4 mln���L10mm����늉���һ��ֵ��15 v�µ�****�D�ٞ�880 r��nlln��
�����_7 H N��m��2000��nkeshi Morita���@�N늙C�M���Mһ���ͻ���������ͬ�Ĺ�ˇ�����ֱ��1 4 ��mm���L5 mm��ʩ��20V������5 3mN�A�����Č��l
���£�ݔ�����؞�0 67 uN��m����늙C��
�մɉK�w�Y���ij���С��늙C���@�N�����ݔ��Ժ���˹����܌�������Ƶ��A��8mm���L3mm���в�늙C�����I��˾�Ƴ���ֱ��11mm���L2�衢��������մɿv����C���䆢���D�؞�70rnN��m���������A��W���FӢ�������ͳ���늙C���о�����̎��****��λ��2001�����n�}�M�ɹ����Ƴ�ֱ����1mm���L5mm���ͳ���늙C����Y����D3��ʾ�������ډ���մ�����픲�ճ�Y����IЫ�ĽY���OӋ��ʹ����늙C�ӹ���ˇ_�˴��������r���մ���һ�˹�֧�����l������մ������ֱ�ăɂ���һ�A������ӣ�
|



