Ƿ�(q��)��(d��ng)���P(gu��n)��(ji��)ƽ��C(j��)е�ֵĿ���
����܊���R���x
�������պ����W(xu��)���߽����ң�����100191)
ժ Ҫ��Ƿ�(q��)��(d��ng)ƽ��C(j��)е���ǎ��з������s���ĸ߶ȷǾ���ϵ�y(t��ng)����(du��)���M(j��n)����Ч�Ŀ�����Ȼ�ǂ�(g��)�y�c(di��n)���c(di��n)��(w��n)�}ᘌ�(du��)****�����Եă��P(gu��n)��(ji��)���Σ��o����Ƿ�(q��)��(d��ng)���P(gu��n)��(ji��)ƽ��C(j��)е�ֵ�
��(d��ng)���W(xu��)���̣���(j��)�˷�����ԓϵ�y(t��ng)�Ŀɷe�ԡ����Ի�����(w��n)���ԡ��ɿ��ԺͿɷ����(zh��n)���ԡ�����(j��)����Ŀ��(bi��o)�IJ�ͬ���������΄�(w��)�֞��(zh��n)�������Ρ��(zh��n)������(g��)ƽ���c(di��n)��ۙ�r(sh��)׃��̖(h��o)3�N����ᘌ�(du��)�@3�N�����΄�(w��)���քe����˸��N���еĿ��Ʒ�ʽ���м�(x��)�����ˣ������ă�(y��u)�c(di��n)���д����M(j��n)�ĵط�һ���̽����Ƿ�(q��)��(d��ng)ƽ��C(j��)е�ֵ��о�����Ҫ��Q�Ďׂ�(g��)�P(gu��n)�I��(w��n)�}��ָ��δ��(l��i)�Ŀ����о�����
�P(gu��n)�I�~��Ƿ�(q��)��(d��ng)ϵ�y(t��ng)�����P(gu��n)��(ji��)ƽ��C(j��)е�֣��ɷe�ԣ���(w��n)���ԣ��ɿ���
�Ї�(gu��)���̖(h��o)��TP 27 �īI(xi��n)��(bi��o)�R(sh��)�a��A
Control of an Underactuated Planar 2R Manipulator
L��Ming-jun,VIA Bao-li
(The Seventh Reseawh Division��Beihang University��Beijing 100083��China)
Abstract��The control pmblem of the underaetnated planar manipulator with high nonlinearity an d nonholonom)are introduced��Fhe dy-namlcal model of the typical esse with two joints is presented The integrability��linearization��stability��controllability an d feedback sta-bilization ofthe model are analyzed��According to the control objectives��the control task is derided into three types��stabilizing to the manifold��stabilizaing to a single equilibrium an d tracking the time-variant signals Control schemes of these tasks are reviewed��an d the advantages an d the disadvantages of these schemes are analyzed .Finally��some key problems for control of underactuated planar manip-ulators ale proposed��an d the further possible resealch directions are pointed out
Key words��underaetuated systems��planar 2R manipulator��integrability��stability��controllability
1����
Ƿ�(q��)��(d��ng)ϵ�y(t��ng)��ָ����ݔ�낀(g��)��(sh��)���ڏV�x����(bi��o)��(g��)��(sh��)��ϵ�y(t��ng)��һ�㶼����һ�A����A��������[1]��������ȫ�������Ի��ȏ�(f��)�s���ԣ�ʹ�Â��y(t��ng)�ķǾ��Կ��Ƽ��g(sh��)�練����[2]���ߵ����淨[3]����ģ����[4]��ֱ�ӻ��g��ʧЧ��Ŀǰ�Пo(w��)����Ď����ձ��ԵĿ��Ʒ�������ˣ�Ƿ�(q��)��(d��ng)ϵ�y(t��ng)�Ŀ��Ɔ�(w��n)�}��Ȼ��һ��(g��)�_���Ԇ�(w��n)�}[5]��
Ƿ�(q��)��(d��ng)���P(gu��n)��(ji��)(��(ji��n)�Q2R)ƽ��C(j��)е���ǽY(ji��)��(g��u)��(ji��n)�ε�Ƿ�(q��)��(d��ng)�C(j��)еϵ�y(t��ng)�����w�F(xi��n)��Ƿ�(q��)��(d��ng)ϵ�y(t��ng)�Ķ���(sh��)��������������A�������ԡ����Խ���ϵ�y(t��ng)�IJ��ɿ��ԡ�Ư���(xi��ng)����(l��i)�ď�(f��)�s�Ե�[6]����ˣ���(du��)�@��(g��)�Y(ji��)��(g��u)��(ji��n)�Ρ����ԏ�(f��)�s��ϵ�y(t��ng)�M(j��n)�е��о������о�����(f��)�s��Ƿ�(q��)��(d��ng)ϵ�y(t��ng)�Ļ��A(ch��)����s��20���o(j��)90����_ʼ����(gu��)��(n��i)��W(xu��)�ߌ�(du��)ԓϵ�y(t��ng)�M(j��n)�����^����о�������˶�N���Ʒ�����ȡ�����^�õ�Ч�������Č�(du��)Ƿ�(q��)��(d��ng)���P(gu��n)��(ji��)ƽ��C(j��)е�ֵ��о��ɹ���һ��(g��)�C���������F(xi��n)�п��Ʒ����ă�(y��u)ȱ�c(di��n)��ָ�������о�����
2)���(du��)��������
1)��(sh��)�W(xu��)ģ���о���(du��)���ǃ��P(gu��n)��(ji��)ƽ��C(j��)е�֣��P(gu��n)��(ji��)1���(q��)��(d��ng)늙C(j��)���P(gu��n)��(ji��)2�]�У���D1��ʾ��
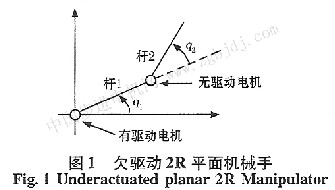 ����(j��)�������շ��̣��x���B(t��i)׃��x=[q 1 q 2 q 1 q 2] T���M(j��n)�л���(ji��n)�����õ�����(d��ng)���W(xu��)���̣� 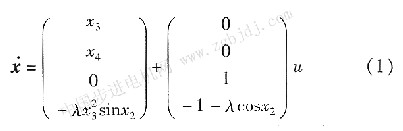 ʽ�У�A�ǽY(ji��)��(g��u)����(sh��)�� 2)�ɷe��ʽ(1)��Ƿ�(q��)��(d��ng)�s����
����(j��)�īI(xi��n)[7]�ĽY(ji��)Փ��ʽ(2)��һ�β��ɷe��(�Ķ�Ҳ�Ƕ��β��ɷe��)����ʽ(2)�Ƕ��A�������s�������A�������s�����ܽ���λ�ο��g�ľS��(sh��)�͠�B(t��i)���g�ľS��(sh��)���@ʹ�û��ڌ�(du��)�Q�Եļs��(ji��n)��Փ[8]ʧЧ��
3)���Ի�������x=0���t�õ�ƽ���c(di��n)���ϣ�
|






