���ʮ�������늄әC��ȫ�ٷ����µ�ֱ���D�ؿ���
�����������
(���Ͻ�ͨ��W���Ĵ��ɶ�610031)
ժҪ�����˝M����ʠ���I늄әC��ȫ�ٶȷ����ȵĿ����D��푑������˷�늙C����׃����ϵ�y��Ӱ푣������һ�N����늄әC��ֱ���D�ؿ��Ʋ��ԣ����ٕr���ÈA�δ�朿��ƣ��ԜpС�D���}�ӣ����ٕr������߅�δ�朿��ƣ��ԜpС��׃���_�P�l�ʣ��������x����늉�ʸ���������ٶȺʹ���ݲ��ГQ�Ŀ��Ʒ�ʽ���F��߅�δ���c�A�δ�朵�ƽ���^�ɣ�����Y��������ԓ���Ʒ����܉F�D�صĿ��لӑB���������C�˿��ƾ��ȣ��ڴ��ʽ����{���о���һ���ą����rֵ��
�P�I�~����������늄әC�����ʣ�ֱ���D�ؿ��ƣ��A�δ�朣���߅�δ�朣�ƽ���ГQ
�ЈD���̖��TM343 �īI���R�a��A ���¾�̖��1004-7018(2010)01��0054��03
0����
ֱ���D�ؿ�������ʸ������׃�l�{�ټ��g���A�ϰlչ������һ�N���͵ľ��и����ܵĽ���׃�l�{�ټ��g�������D�؞���ƌ���ͨ�^�z�y���Ӷ˵�늉��������׃����ݔ��****��PWM��̖�����F����׃���_�P������****���ƣ��ԫ@���D�صĸ߄ӑB���ܡ��@�N���Ʒ����ںܴ�̶��Ͻ�Q��ʸ��������Ӌ����s����������늙C����׃����Ӱ푡����H��r�y���_����Փ�����Y����һЩ��Ҫ���g���}�����ҿ��ƽY�����Σ������ֶ�ֱ��[1]��
���ڴ��ʠ���ϵ�y���f������ϵ�yҪ��Ĺ��ʴ������������{�ٷ��������@��Ҫ��늙C�ĄӑB푑��죬���Ҍ��\�Зl����ͻȻ׃���܉��������r��������˲��ø߄ӑB푑�������ֱ���D�ؿ��Ʋ����DZ��^�m�ϵ��x������ֱ���D�ؿ����ڵ��ٷ����D���}�Ӵ��ڸ��ٺ����ŷ����_�P�l�ʸߣ���ˌ��ڲ�ͬ���ٶȷ�������ȡ��ͬ�Ŀ��Ʒ�ʽ���ԫ@ȡ****�Ŀ���Ч���������ڵ��ٕr���ÈA�δ�朿��ƣ����ٕr������߅�δ�朿��ƣ������ٶȺʹ���ݲ��ГQ�Ŀ��Ʒ�ʽ�����F��߅�δ���c�A�δ�朵�ƽ���^�ɣ����F�˴��ʮ�������늄әC��ȫ�ٶȷ����µă������ơ�
1���Wģ��
1.1����늄әC�Ĕ��Wģ��--
����늄әC�Ĕ��Wģ����һ����׃�����Ǿ��ԡ�����ϵ�ϵ�y�����ֱ���� H�oֹ����ϵ(A��B��c)�½���ģ�ͣ��t�䔵�Wģ�͕��dz����s�����һ��ͨ�^Parkʸ��׃�Q[1]���������oֹ����׃�Q������oֹ����(��-��)��Ȼ���ڃ����oֹ����ϵ�Ͻ�������늄әC�Ĕ��Wģ�͡�
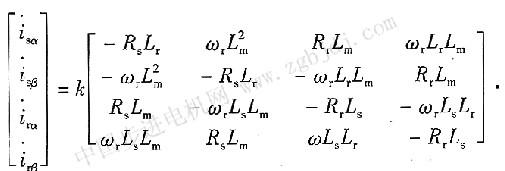
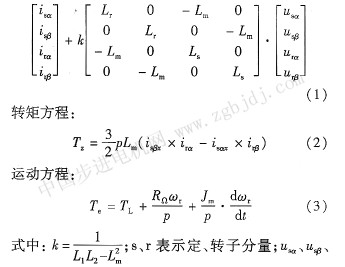
�ڦ���������ϵ�£���늙C���D��������B׃�����õ�����늄әC�Ġ�B���̣�
Ur����Ur���քe�鶨���D���ڦ������S�ϵ�늉������������±�ʾ�����oֹ����ϵ�������S��is����is����ir����ir���քe�鶨���D���ڦ������S�ϵ����������Rs��Rr���քe�鶨���D����裻Ls��Lr�քe�鶨���D��늸У�Lm�鶨���D���@�M�g���У���r���D��늽��ٶȣ�p��O������Jm���D�ӑT����TL��ؓ�d�D�أ�R����늙C����ϵ����
1��2��׃�����Wģ��
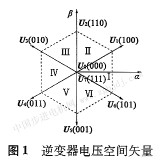
����һ�_�������cʽ늉�����׃����һ�������M�������_�P�M��8���_�P��B(Sa��Sb��Sc��Sa��Sb��Sc��)���������γ���D1��ʾ��8��늉����gʸ����
���_�P��B�顰1���r����������_�P��B��ͨ�����_�P��B�顰0���r����������_�P��B���_�������׃����ݔ��늉����������t��ݔ��������늉���:
�_�P��B��̖[S a S b s c] T��ͨ�^늉����gʸ���ă����x��õ�����[S a S b s c] T=[0 0 0] T�����߮�[S a S b s c]] T=[1 1 1] T�r�� |