����ģ��PID�Ľ���늄әCʸ������ϵ�y
�ܺ�����������������|
(�|�A��W���Ϻ�201620)
ժҪ������늄әCʸ������ϵ�y��һ���Ǿ��ԡ�����ϡ��r׃�ď��sϵ�y���Â��y��PID�y���_������Ŀ���Ч��������ģ������ԭ���c���yPIDԭ����Y���OӋ��ģ��PID������������Y������������ģ��PID�������Ȳ��ó�ҎPID���������и��õĄӷ��B���ܡ�
�P�I�~��ʸ�����ƣ�ģ�����ƣ�PID���ƣ�ģ��PID���ƣ�����늄әC
�ЈD���̖��TM34 �īI���R�a��A ���¾�̖��1004��7018(2010)01��0064��03
 0���� ����늄әC�Y�����Ρ��ɱ��ͣ����b�h��Ҫ��ͣ��m����ȼ���ױ������m�Ĉ��ϣ��������ڴ����������D�ّ����I������A�����ǽ���늄әC��һ����ݔ���ݔ��(MIMO)���Ǿ��ԡ�������ҕr׃�ı��،������ڱ��،���ď��s�ԣ�ֱ�ӌ����˽���늙C�D�ؿ��Ƶ����y��ͨ�^ʸ�����ƣ�������늄әC��Ч��ֱ��늄әC���Ķ��@���^�õ��D�����ԡ�
������������W�ߌ����ʹ늙Cʸ�����Ƶ�Ч�������@���M�������P���о�������ʸ�����ƵĻ��A�ϲ���ģ��������[1]��ģ��������һ�N����Ҏ�t�Ŀ��ƣ����OӋ�б��،�����Ҫ�������_�Ĕ��Wģ�͡�ģ�����������ԫ@�����õĄӑB���ԣ����o������ϵ�y���o�B�`�
�����ڷ���ʸ�����ƵĻ��A�ϣ��Y�ϳ�ҎPID��������ģ�������������c������ģ��PID������������������늙C�{��ģ�͡�ͨ�^�c���y��PIDʸ������ģ���M�б��^��Ԕ���f��ԓģ�͵����c��
1����늄әCʸ������
�Ԯa��ͬһ�����D�ńӄݞ�ʄt����������늄әC�Ķ��ӽ������ia��ib��ic��ͨ�^���࣯--��׃�Q���Ե�Ч�Ƀ����oֹ����ϵ�ϵĽ������i����i������ͨ�^ͬ�����D׃�Q�����Ե�Ч��ͬ�����D����ϵ�ϵ�ֱ�����id��iq��
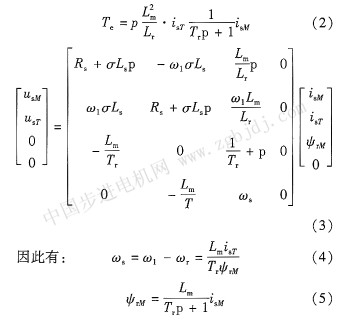
�����D�Ӵ�朶���l���r����늄әCģ�ͣ�ȡd�S�����D�Ӵ��ʸ����r����M�S��T�S����r��D90������ֱ��ʸ����r�����������D�Ӵ�朦�r��������M�S�ķ��˕r�Ц�rd=��rM=|��r|,��rq=��rT=0���õ��˕r늴��D�غ�늉����̞飺
ʽ�У�p��O������L m�黥�У�L r���D��늸У�L s�鶨��늸У�R s�鶨����裻  ��p�������ӣ�  ��ͬ�����D�٣��� r��늙C�D���D�٣��� s�����D����D�٣�  �� �����Ϲ�ʽ���Եõ����½Y����
�D�Ӵ�朦�r�H�ɶ��������ŷ���isM�a�����c�D�ط���isT�o�P��ʽ(5)߀������rm�cisM֮�g�Ă��f������һ�A�T�ԭh����������������isMͻ׃�r����r��׃��Ҫ�ܵ���őT�Ե���ϣ��@��ֱ��늙C����@�M�đT��������һ�µġ�
�D�Ӵ�朵�λ�ÿ���   �ó������ڽ�������늄әC���������D�Ӵ�朵ij�ʼλ�æ�r(0)���ɶ�������Q���ģ����ϵ�y�\�Еr�Ͳ���ʸ�����ƣ��t�����J���r(0)=O���õ����λ�æ�r����ͨ�^���D׃�Q�õ�����������isM���M������ʽ(5)���ɰ��rM������ʩ��������[2]��
�D1�Ǹ�������ԭ��������ϵ�y����D������늄әC���������PWM��׃������ӣ��D�ٿ����������o���D���c���y�D��֮��õ��D������ֵT e���D���������i sT |