�����@���C(j��)�ğo(w��)ˢ늙C(j��)�(q��)��(d��ng)��Ӌ(j��)��C(j��)����
��ժҪ1���Ƚ�B�������@���C(j��)�ğo(w��)ˢ늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)��(g��u)�ɣ��������乤�r���c(di��n)���ڴ˻��A(ch��)�������ϵ�y(t��ng)��Ӌ(j��)��C(j��)���Ʋ����Լ���(sh��)�F(xi��n)����ӑՓ�˟o(w��)ˢ늙C(j��)���ٶ��]�h(hu��n)���ƺ���ӄx܇���}I���(ji��n)Ҫ��(b��o)����ϵ�y(t��ng)���{(di��o)ԇ��r
[�P(gu��n)�I�~]�@���C(j��)���o(w��)ˢ늙C(j��)����(sh��)����̖(h��o)�����������Ʋ���
Ŀǰ�@���C(j��)����ϵ�y(t��ng)һ����CNC(Computer��
ized Numei-��ical C0ntr01)�@���C(j��)���������Б�(y��ng)늙C(j��)���Б�(y��ng)늙C(j��)׃�l�������M(j��n)늙C(j��)����š��C(j��)е�x܇���M�ɣ����ȣ��@���C(j��)Ҫ���(q��)��(d��ng)늙C(j��)���п��ن���(d��ng)�����لx܇�������e���@���C(j��)ͣ܇�r(sh��)Ҫ��(zh��n)�_(��cNc�@���C(j��)�������O(sh��)���@100Ȧ��늙C(j��)�D(zhu��n)100Ȧ�͵�ֹͣ)����һ��ĸБ�(y��ng)늙C(j��)׃�l���]����ӄx܇�Ĺ��ܣ�ֻ�������ⲿ��늴ńx܇�����Ҫ����늴ńx܇����ʹϵ�y(t��ng)�Y(ji��)��(g��u)��(f��)�s���w�e�^�x܇�������������ӣ�
ϡ�����şo(w��)ˢֱ��늄�(d��ng)�C(j��)(���º�(ji��n)�Q�o(w��)ˢ늙C(j��))���@���C(j��)����ϵ�y(t��ng)�������(q��)��(d��ng)늙C(j��)��������֪���o(w��)ˢ늙C(j��)�����c��ˢֱ��늄�(d��ng)�C(j��)������������(d��ng)���{(di��o)�ٺͿ������ܣ���늙C(j��)�܉�?q��)��F(xi��n)���d(���^�d)����(d��ng)�͟o(w��)��(j��)�{(di��o)�٣��e�������Ը���(j��)�o(w��)ˢ늙C(j��)�Ļ�����̖(h��o)���^���_���M(j��n)���@���C(j��)��λ�ÿ��ƣ��@�Ӳ��H���Ժ�(ji��n)��ϵ�y(t��ng)�ęC(j��)е���·�Y(ji��)��(g��u)�����ͳɱ�������߀������ϵ�y(t��ng)�����w���ܣ�ʹ�@���C(j��)�������Ј�(ch��ng)��(j��ng)��(zh��ng)����
�������Ƚ�B�������@���C(j��)�ğo(w��)ˢ늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)��(g��u)�ɣ��������乤�r���c(di��n)���ڴ˻��A(ch��)�������ϵ�y(t��ng)��Ӌ(j��)��C(j��)���Ʋ����Լ���(sh��)�F(xi��n)������ӑՓ�˟o(w��)ˢ늙C(j��)���ٶȲɘӺ���ӄx܇���}�����(ji��n)Ҫ��(b��o)����ϵ�y(t��ng)���{(di��o)ԇ��r��
1 ϵ�y(t��ng)�M�ɼ����r
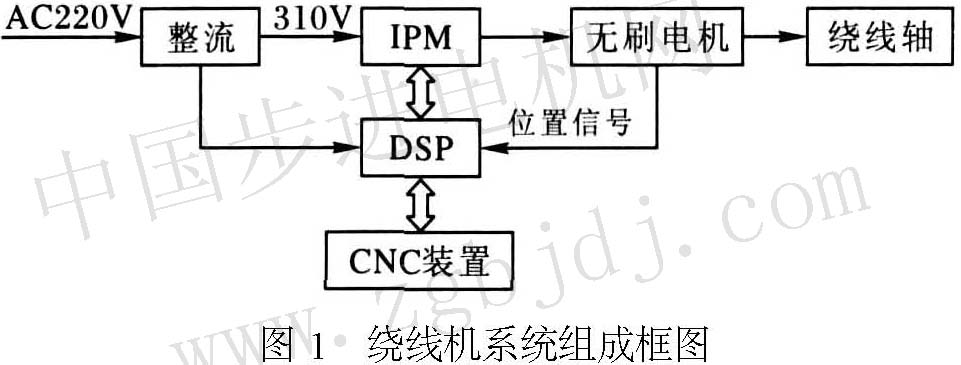
�@���C(j��)��ϵ�y(t��ng)�M����Dl��ʾ��ԓϵ�y(t��ng)��220v�����Դ��늣���(j��ng)���������׃?y��u)?10 vֱ��늉��o��������늣��x��310 V(Dc)��400 w��6 000RPM�ğo(w��)ˢ늙C(j��)�����(q��)��(d��ng)늙C(j��)��ϵ�y(t��ng)��Dsc���ƣ��o(w��)ˢ늙C(j��)�(q��)��(d��ng)������cNc�@���C(j��)����������̖(h��o)�M(j��n)
�І���(d��ng)ͣ܇���ƣ�
DSC��ϵ�y(t��ng)�Ŀ��ƺ��ģ�����Ҫ�����ǣ���һ������(j��)������̖(h��o)��(sh��)�F(xi��n)��(du��)�o(w��)ˢ늙C(j��)�ēQ��ȿ��ƣ��ڶ�������(j��)cNc�@���C(j��)��������̖(h��o)����늙C(j��)�Ć���(d��ng)ͣ܇������������(j��)cNc�@���C(j��)�������o���ٶ���̖(h��o)�M(j��n)���ٶ��]�h(hu��n)���ƣ�ᘌ�(du��)�@���C(j��)�ⲿ��̖(h��o)̎���͟o(w��)ˢ늙C(j��)���Ƶ���Ҫ���x��MIcROcHIP��˾��16λ������dsPIC��30F2010���鱾ϵ�y(t��ng)�Ŀ���оƬ��
����28��(g��)I��O�ڣ���I��O�ڶ�����25 mA��������������3��(g��)ͨ�õ�16λ���r(sh��)����12 KBƬ��(n��i)�W����g������4��(g��)16λݔ�벶�����^�������_��2��(g��)16λ���^��PwMݔ���������_��늙C(j��)����PwMģ�K��Ƭ��(n��i)6·l MsD s�D(zhu��n)�Q���ʵ�10λģ��(sh��)�D(zhu��n)�Q����3��(g��)�ⲿ�ƽ�Д�Դ�ȵȣ��@��Dsc̎���@���C(j��)���ⲿ������̖(h��o)�Ϳ��Ɵo(w��)ˢ늙C(j��)�ܺ��m�����O(sh��)Ӌ(j��)�����·�r(sh��)����Ҫ����̫����ⲿ�·��ʹϵ�y(t��ng)���Ӻ�(ji��n)�Ρ��ɿ���
2���Ʋ���
����(j��)�@���C(j��)�Ĺ��r���c(di��n)��ϵ�y(t��ng)�Y(ji��)��(g��u)�����������˼���ǣ����ȣ�����(j��)cNc�@���C(j��)�������o���Ŀ�����̖(h��o)����(d��ng)ֹͣ늙C(j��)���@���C(j��)���@���r(sh��)ؓ(f��)�d���Ǻܴ��@һ�c(di��n)Ҳ������늙C(j��)�Ŀ��ن���(d��ng)�����لx܇��ͣ܇��cNc�@���C(j��)������Ҫ���ù���M(j��n)���ٶȲɼ���Ȼ�����(j��)�������ϵ��O(sh��)����r׃���o���D(zhu��n)����̖(h��o)��
ϵ�y(t��ng)�Ŀ���ܛ������ģ�K���O(sh��)Ӌ(j��)��������ֻ�nj�(du��)�ӳ����M(j��n)���{(di��o)�ã����w�������ӳ����(zh��)�У��ӳ��������늙C(j��)�\(y��n)�D(zhu��n)�ٶ��]�h(hu��n)�����ӳ���cNc��������̖(h��o)�����ӳ�������(d��ng)�ӳ���ͣ܇�ӳ��x܇�ӳ���ȣ��������_ʼ̎�ڵȴ���B(t��i)��һ���z�y(c��)��cNc�������Ć���(d��ng)��̖(h��o)���͕�(hu��)늙C(j��)�\(y��n)�D(zhu��n)����(l��i)����(d��ng)�z�y(c��)���x܇��̖(h��o)�r(sh��)�͆���(d��ng)�x܇����(d��ng)�D(zhu��n)���������O(sh��)�õĿ�?c��)��?sh��)�r(sh��)��늙C(j��)�Ԅ�(d��ng)ͣ܇��Ȼ����������M(j��n)��ȴ���B(t��i)����늙C(j��)������(d��ng)���\(y��n)���^���аl(f��)�����D(zhu��n)��Ҳ��(hu��)�Ԅ�(d��ng)ͣ܇��������˲���ѭ�h(hu��n)��
2��1 cNc��������̖(h��o)�Ľ���
cNc��������늙C(j��)�(q��)��(d��ng)����5�l��̖(h��o)�����քe�ǹ����ˡ��x܇���ٶ��{(di��o)��(ji��)���l����̖(h��o)������(d��ng)�������D(zhu��n)�ГQ���@Щ��̖(h��o)��cNc��������늙C(j��)�(q��)��(d��ng)��֮�g�Ă��ͣ����M(j��n)�й�����x |



