����ʽ��Ҋ�����M늙C������ͨ�ԡ�����t������r��늙C�������ʸ���Ϳ��Ԍ��F����������D���ň�ʸ��Ҳ�Ǻ���������D�ģ���˲������Ҳ������ӾͿ��Ԍ��F���M늙C�ĺ��D�ء����\�С�
2�����׃�����F
һ�㼚�ֿ���ϵ�y��̎�������nj����ȸ���ʽ(1)Ӌ������Č����ڲ�ͬnֵӡ�֔�)������O��ֵ���Ƴɱ���惦�ڴ惦���У�ϵ�y�\�Еr������s320F2812�IJ��M늄әC�����׃��������ϵ����լ�tī�㣬��ֻ��Ҫ�������M�в�ԃ���ɡ��@��****�ă��c���dz����ƺ��Σ�����������Ӌ���ٶ�Ҫ��͡������@�N�������ڃɂ������ȱ�ݣ���һ��һ�N���֔�����һ��������O�����������܃���̫����O��ֵ����Ҳ�Ͳ����������������⼚�֣��ڶ������ŷ�ϵ�y�У�Ҫ��늙C�кܺõ��{���ԣ���늙C�\�еļ��֔����D�����ϵ�ģ����֔��ĕr��늙C�D�پͲ�����̫�ߣ�Ҳ�����f���{�����кܸ�Ҫ��r��****���܌�늙C�ļ��֔��M�п����ГQ������������ķ�������׃�Q���֔��r��Ҫ�ڃɂ�����֮�g�ҵ��Y���c�����F�t���^�韩�����Ҫ�����Ե����@�ӵ��ГQ�Ǿ����y�ˡ�
����ʽ(1)��ʽ(2)���Կ���������������Ҫ�_����Ŀ���Ǵň���Ҫ��׃������������O���ƣ����鳣����O���ض���lllO flllO=���I)׃����Oֵ�������֔�n�����ֱ�ӌ�lllO�M���{�����Ϳ����������F�����׃���֡��@�ӣ�ʽ(1)���Ğ飺
ϵ�y���F�rֻҪ��ÿ�ΓQ��֮ǰӋ�����һ����С��](��ͨ�^����ƽ���Ƴ�)�����^�ֿ��������f��һ��NVM����������@�c�\���Ǿb�b����ģ��r��늙C�\��һ�����������ܶ���
m��M���ڡ�ͬ�r����p�ٿ�������ؓ���������ڸ�׃���֔������rӋ�����һ�����ڵ�����O��ֵ�����������ĵڶ��������_ʼ��ϵ�y�Ϳ�����������@ȡ��������O��ֵ��
3ϵ�y���F
3��1Ӳ��
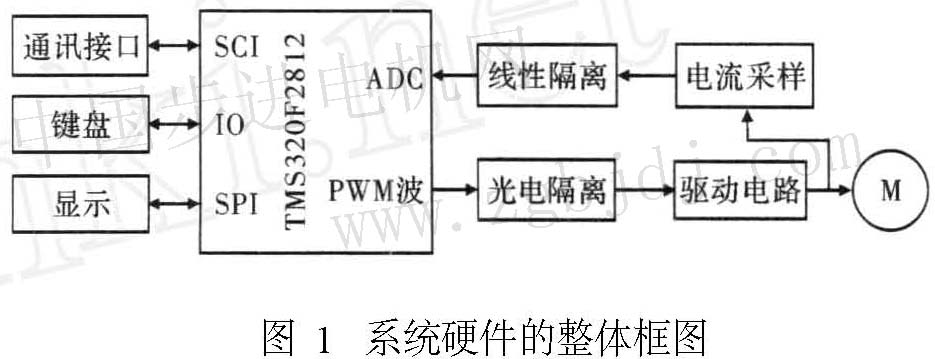
�����������ϵ�y�Ը�����DSPоƬ�h$320F2812����ģ��������·������z�y�·�����Nͨ�Žӿں��I�P�@ʾ�·�����ɹ����Rȫ��������ʽ���M늙C������ϵ�y��Ӳ��
ƽ�_�����w��D��Dl��ʾ��
1)���·
����������Ĺ��ʹܲ���RF530N���书�ʵ�
����100 v��15 A����




