һ�Nָ�������l���Ҳ����ֵă�����ʽֱ�����M늄әC�����о�
ժҪ����B��һ�N����C8051F005��Ƭ�C���Ƶă�����ʽֱ�����M늙C(LR��)�������������к����ز���ָ�������l�����Ҳ��ȷ����ֵĹ��ܡ��yԇ�Y������������������
�õĄӑB���o�B���ԣ����ҽY�����Σ�ʹ�÷��㣬������LtM���w�аl�������O�䣬ͨ�^��ܛ������Ҳ���ƏV����������LtM���ӿ��ƣ������^�õđ���ǰ�����P�I�~��ֱ�����M늄әC��ָ�������l�����֣��yԇ
0����
Ŀǰ�҇������аl��ֱ�����M늙C�ӿ������͇�����Ȳ��ܴ��H�����ж�ʹ�Ç����ͨ���ӿ��������ɱ��^�ߣ����ȮaƷ�N��٣����Ҵ֮aƷ����ֻ���^�ٙnλ����λ���Ȳ����룬늙C�\�в������������^���{�ٿ��Ǝ�������ֱ�������ٿ��Ƽ��g�����ܺܺõذl�]ֱ�����M늙C�ļ�̓���ܣ��ٶȿ��{������խ���@Щ���؇����Ƽs���҇�ֱ���}�_늙C���ƏV���á�1�ӿ��Ʒ���
1 1�ӿ��Ƽ��g����
(1)��Ҏ�Ӽ��g��Ҫָ��늉�������ӡ��p늉��Ӻߵ͉��ӡ����c���·���Ρ��ɱ��ͣ�ȱ�c���������Ĵ�늙C���l�\�в�ƽ�������^���ƾ��Ȳ���ߡ�����
(2)�����ز��Ӽ��g���c���܉��C늙C�����D�ص�ƽ��ֵ�����㶨��ͬ�r늙C�ĸ��l푑�������ߣ�����F��p����ȱ�c�Dz��ܽ�Q늙C���������еĵ��l��ӆ��}��
(3)�����ӿ��Ƽ��g���c�������늄әC��ϵ�y�ֱ��ʺ��\��ƽ���ԣ���Q���l��ӆ��}���Mһ������ϵ�y�Ġ������ԡ�
(4)�Ӝp�������l���Ƽ��g���c�DZ�����ʧ���o�����ӡ��\���^����ʧ����ֹͣ�r�^�_�ȬF��
1 2�����x��
Lmd��Ӻ�����������͵�늙C���ߡ������Ӽ��g�Ɍ�늙C���}�_�������pС���࣬���C늙C���ٕrƽ���\�У���늙C�����͘O��һ������r�������늙C�ķֱ��ʣ����F���_��λ����I_,PM��һ�����Կ�֪��늙C��늴������S���}�_�l�ʵ��������½��������l��Խ�ߣ�����늴�
����ԽС�����d����Խ��������l���^�ߕr�����ӕr�����ʧ����ֹͣ�r�֕��l���^�_����ˣ���늙C���^�ߵ��ٶȹ�������횽����������l��
�Ʋ��܌��F������������l�^����ݔ�����}�_�l��׃�����������tʹ늙Cʧ���������ٕr�g���L������ʹ늴������_�����OӋָ�ˣ�������늙C��****�����ٶȡ�J��
�C���������ӿ��Ʒ����_���鰴ָ��Ҏ�������ٵ����Ҳ��ȷ������ӿ��ơ�
2 �� ��
2��1���Ҳ������㷨
��,PM���J�������D���M늙C��չ�_�����ԣ����D���M늙C���Ҳ��ȷ������㷨Ҳͬ���m���ڌ�LPM�Ŀ��ơ�
�O������ʽ���D���M늙C�ă����@�M������M����������Pϵ��
 ʽ�У�p��늙C�S�A��λ�õ�늽Ƕȣ�k�������F��Ч�������ķ�ֵ�� ʽ�У�p��늙C�S�A��λ�õ�늽Ƕȣ�k�������F��Ч�������ķ�ֵ��
�������뻯ģ��(��Ӌ�F��͵�Ӱ푲����ԴŌ��иߴ��C����Ӱ�)�������@�M�зքeͨ��ģ�M��������������t�ɵõ����ͬ���C���D����
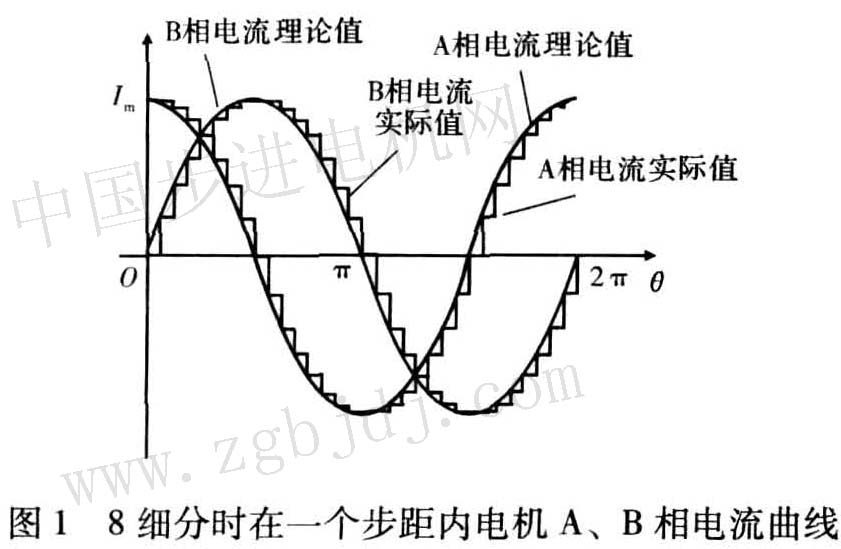
�ԣ�ʹ늙C�������D���ȷ������㷨�������Ĕ��ֻ��������ģ�M����������Ķ����F�ӿ��ơ��Dl��8���֕r����һ��������늙CA��B�����@�M�����׃����r��
2��2ָ�������l�㷨
һ���������Ҏ���OӋ�������x��ֱ��Ҏ�������١��@�N���Ʒ������Ρ������������}�_�l��׃����һ���㶨�ļ��ٶȣ����Բ��ܱ��C�������^���Є��Ӽ��ٶȵ�׃���c����늴�����׃
�����m����δ�ܺܺõذl�]늙C�ļ������ܡ���ˣ��б�Ҫ���}�_�l���M�к������о��cՓ�C��
����һ�N�^�����������������ʹ늙C���\���^
�����܉���ٶ�λ�������\�в����ʴ_�ס�J��
�����ҳ������������Ҏ�ɣ�����LPM�����W���̺���һ�ٶ����������ƌ��������������£�ֱ���}�_늙C�Ą����W����ʽ
 |



