����CPLD�ğoˢֱ��늄әCܛ���ӷ���
�S��܊����䣬�Ϲ₥
(��܊���̴�W��������h430033)
ժҪ����B��һ�N����CPLDоƬ�ğoˢֱ��늄әCܛ���ӿ��Ʒ�����������PWM����pС���ӛ_������M���˷����c�OӋ�����Y���C��������CPLDоƬ���ƣ��Ⱥ��οɿ��������^���Č����ԡ�
�P�I�~���oˢֱ��늄әC�����s�ɾ���߉����������ܛ����
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2008)01��0006��02
0����
Ŀǰ���oˢֱ��늄әC�Ŀ���ϵ�y��Ҫ����DSPоƬ�팍�F�������ڵVɽ���Cе��Ş���ϳ��õ��L�C��ˮ�á��՚≺�s�C���o�C���f�����ճ��\���У�������Ҫ���{��Ҫ�H�HҪ��늄әC��ƽ�����ӣ�������ؓ�d�����\�м���[1]��
���IJ���CPLD��Ɍ��F�oˢֱ��늄әC��ܛ�����^�̣��܉���Ч����늙C���ӕr�ě_��������D���}�ӣ��_��늾W�����a�Cе�İ�ȫ�����\�С�
1����PWM��ܛ���ӵ�ԭ��
�ڂ��y����ֱ��ĸ��늉����Ό�ͨ���_�P�ܵĻ��A�ϣ��o���_�P������̖����ռ�ձ���u�����PWM�����ԜpС�����^���е��^��_�������
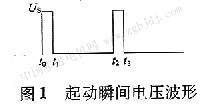
�O���B�rIGBT�_�P�l�ʞ�f��늙C�D�ٞ�n����늙C�O������P��ֱ��ĸ��늉���Us����һ�����ڃȣ�ÿ��IGBT�_ͨ�r�g��  ������֞�m�ȷݣ��t  ��ȡ���CPLD�����ĕr����ڣ���ʼռ�ձȞ�D 1����D1��ʾ����t����t 1�^�g�ȣ��������oˢֱ��늄әC���Wģ�Ϳ�֪�� �������ӕr��늄�(2k����)��С���ɺ��ԡ���Ӌ��ã�
���У�  ��t 1��t 2�^�g������·̎�ڷ�늠�B��Ӌ��ã� �˺��؏������^�̣���ռ�ձ�������D���r��Ӌ��ã�
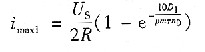
imaxn>imax(n-1)�����O�˕r늙C�D�ٞ�n1����늄ݲ��ɺ��ԣ������]�Q���^�̵�Ӱ푣��t��
�����^���У�IGBT�_�P�l�ʞ�D11-----mԽ��,f2Խ�ߣ��timaxn��ԽС�����������������������ͬ�r�^�ߵ��_�P�l�ʽ���������IJ��ӡ�
D nԽ�ti maxnҲԽ��D 1ͨ��ȡ�ٷ�֮10���ٷ�֮20(���d)���ɈD  ��Dn��ռ�ձ����L��k�Q����t n�����ӿ��r�g�Q���� ��ˣ������ӿ��r�g��ܛ����****���S����_��֮��������m���pСD1������k��
2����ϵ�y�OӋ
2��1ܛ��ϵ�y�OӋ
���ڱ�ϵ�y������Ahera��˾****�_�l��Quar-tus���OӋܛ����cPLDʹ��Ӳ�������Z��(VeilogHDL)�M���������̡�
CPLD����ԭ���ǣ���������늺�CPLD������������λ����̖���a������������ݔ����̖���c��ͬ�r���a��ռ�ձ���u����ľ��β�PwM��̖(ռ�ձ�������1�Ŀ��r�g���늙Cؓ�d��r��ͬ����)�����ɽM��̖�քe�M��߉�c����������оƬݔ��������ֻIGBT�����|�l��̖����D2 |