�z��������ģ������PID��������SRM�еđ���
�̾S��
(�����ЏV���ҕ��W�����K����213001)
ժҪ��ᘌ��_�P����늙C��ϵ�y�ć��طǾ��ԡ��r׃�͏�����ԣ��������߷����C����ģ��������Փ���ڂ��yPID���������A���OӋһ�Nģ������PID������������������z���㷨��PID�����������M�Ѓ����OӋ����������Y�������������z��������ģ������PID�������������õ��{�ٺͿ������ԣ�������������@���ڂ��yPID���ƺ�ģ������HD���ơ�
�P�I�~���_�P����늙C���z���㷨��ģ������PID������
�ЈD���̖��TM352 �īI���R�a��A ���¾�̖��1004��7018(2008)01��0008��03
0����
�_�P����늄әC(���QSRM)�{��ϵ�y���S�������Ӽ��g����X���g�Ϳ��Ƽ��g�lչ��������һ�������o���{��ϵ�y�����@�����c��늙C�Y�����Ρ��{�ٷ����V�������D�ش��{�ٺͿ������ܺá�Ч�ʸߡ�SRM�ڵ͉���С���ʵđ��È��ϣ��������ͨ�Į���늄әC��ֱ��늄әC��Ŀǰ�������ˇ�����W�ߵ��ձ��Pע�������о������ںܶ��I��õ��ˏV���đ��á���SRM��·�ĸ߶ȷǾ��ԛQ��������һ���r׃�ġ��Ǿ���ϵ�y�����y����侫�_�Ĕ��Wģ�ͣ����ԑ��Â��y�ľ��Կ��Ʒ���(��PID����)�y�ԝM��ӑB�^���SRM�Ǿ��ԡ�׃�Y����׃������Ҫ����ʹSRMϵ�yȡ�Ã������{�����ܺͿ���Ʒ�|�����Č��z���㷨��ģ�����ƺ����߷����C���c���y��PID������Y�ϣ��OӋ��һ�Nģ���������m��PID�������������z���㷨����������������������������SRM�{��ϵ�y�У�����MAT��LAB�M�з��挍�����Ч�����@���ڂ��yPID��������ģ������HD�����������к��������Ժ����m��������
1 SRM����ԭ��
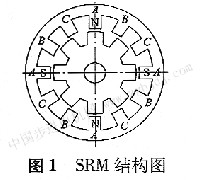
�D1��SRM�ĽY��ʾ��D,�����D�Ӟ��p�O�Y��������������D�ӵ�����λ��������ʼλ�ã���������B���@�Mͨ늕r���͕��a��һ��ʹ�����D���cԓB���@�M�S���غϵ�늴��D�أ��D�ӱ�������������rᘷ����B�m���D�������νoC���@�Mͨ늣��t�D�ӌ�형r����D����ˣ�SRM���D��ȡ�Q�����@�Mͨ늴����c���@�M���������o�P��
����SRM�Ǹ߶șC�һ�w���ğo���{��ϵ�y������늚ⲿ�֡��Cе���ֺ͙C�ϵ���֣��䔵�Wģ�������飺
ʽ�У�Uk��Rk��ik����k�քe���k���@�M��늉�����衢����ʹ�朡�
(2)�D�ط���
ʽ�У�Wk��Tk�քe��늙C��k��Ĵň����ܺͮa����늴��D�أ��Ȟ��D��λ�ýǣ�Ttotal�鿂��늴��D��(�������D��֮��)��
(3)�Cе�\�ӷ���
ʽ�У�J��ϵ�y�D�ӑT����B��Ħ��ϵ����TL��ؓ�d�D�ء�
�������Wģ���У�����SRN���ڇ��ص��Ч����߅��Ч���ͷǾ��ԣ���֮�\�Еr���_�P�Ժ��ܿ��ԣ��o���������^���_�Ĕ��W�Pϵ��������y�ľ��Կ��Ʒ������y�ԝM��SRM�Ǿ��ԡ�׃������Ҫ����ȡ������Ŀ���Ч����
2 SRM��ϵ�y�OӋ
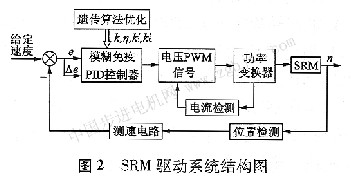
SRM�{��ϵ�y��Ҫ��SRM������׃�Q������������λ�Ùz�y���Ȳ��ֽM�ɣ���������ϵ�y���ИУ��������ٶ�ָ��ٶȷ�����̖�������������λ�Â���������Ϣ���������M�оC�Ϸ���̎�����l��������̖�����F��SRM�\�Р�B����Ч���ơ����Ŀ����������z���㷨������ģ������PID��������ϵ�y�Y���D��D2��ʾ��
2.1����PID����ԭ��
����PID�������ǽ��b����ϵ�y�����ߙC�����OӋ��һ�N�Ǿ��Կ������� |