���ڏ����S�h�����в��ͳ���늄әC˲�B����
�V������S����ƽ������������c
(�㽭��W���㽭��ئI 310027)
ժҪ��Ӌ�����S���ȭh���ď��ԺͶ��D�������fģ�ͣ�����������˲�B���Ե��\���ַ��̣����o����⡣���ó���˲�B���Ԝyԇϵ�y����S�͌����C������ģ�͵Ĝʴ_�ݺ���Ч�������L�cָ��rӰ�푑��r�g������ϵ����Ҫ��Դ�ڽ��|���Ħ�����ᣬ����늙C�D�S��Ħ�����ᡣ
�P�I�~���в��ͳ���늄әC�������S����˲�B����
��Ȧ���̖��TM35 �īI���R�a��A ���¾�̖��1004��7018(2008��01��0017һ04
�� ��
����늄әC��ͨ�^���l��Ӻ�Ħ���ӵ�늙C�����нY�����Ρ�푑��ٶȿ졢������i�����ٴ��D�ص����c�������ٴ��D�ص��������S���O�����ѽ��õ���֑��á�����늄әC�ĸ߷ֱ��ʺͲ��M�����c��푑��ٶȿ����P����ˌ���˲�B���Ե��о����H�����ڌ�����늄әC���J�R��������ڸ��õؑ����@һ���c��
Ŀǰ����������늄әC��˲�B���ԕr�Ѓɂ����c��һ��ͨ�������S����늙C�S���B�ӭh���ď��ԣ����Ä����B�ӵ�ģ�́����������W����[1-5]���@��늙C�\�еķ��B���Է���Ӱ푲�����늙C���ӻ��ߔ�����i�r˲�B�^�̵����Է�����Ӱ푅s�dz�ͻ�����@�ӵ�ģ���c���H�ù�늾��a���B�ӵĜyԇϵ�y��һ���ij��롣���������ķ�����늙C�S������ϵ�������ñ��R�ȷ�����ȱ����a��ԭ�����ҪӰ����صĶ��������������������c��������
�돗���S��ģ�ͺͶ��D��Ħ���������fģ�ͣ��������������ַ��̣����o�������⡣ͬ�rͨ�^�yԇϵ�y���F�˳���늄әC��˲�B���Ԝyԇ������Փ�͌��ɷ��������˲�B���ԡ�
1˲�B���Ե���Փ����
1.1���}���������Wģ��
����늄әC���Ӻ��P���˲�B�^�̾������ɂ��A�Ρ��������^�̵ĵ�һ���A�Σ����ӱ����в����������˲�g����������������B������D��̎��һ���^�͵��D�٣��ڶ����A�Σ��D�Ӽ���ֱ�����B�D�٣�������ɡ�ͬ�ӣ����P���^�̵ĵ�һ���A�Σ����ӱ����в�������P��˲�g�ķ��B���˥�p���㣬�в���ʧ���D���_ʼ�p�٣��ڶ����A�Σ��D���^�m�p�����D�ٞ��㣬늙C�P�ࡣ
���Ӻ��P���^�̵ĵ�һ���A�ξ��鶨���в�׃�����A�Ρ�һ����f���ڷ���˲�B���ԕr�����Ժ����@һ���A�Σ����J�鶨�ӱ����в���׃�����A�S푑����@�ӼȺ����˔��Wģ�ͣ������˷�����ͬ�rҲ�������̫����`��ܺܺõط�ӳ����늄әC�ķ��B���ԣ�������˲�B�^���У����ڳ���늄әC���D��׃���^�죬�����B��ģ���ѽ����ܜʴ_��ӳϵ�y���D��׃��Ҏ�ɣ��e�ǜyԇϵ�yһ���c��늾��a��ͨ�^�S�������S���c늙C�S��늾��a
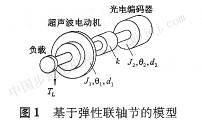
���S���ֵď��ԭh����횿��]����˱��Č���һ��˲�B���Ԝyԇϵ�y����D1��ʾ���Wģ���������D��J1�鳬��늄әC�D�Ӻ�ؓ�d���D�ӑT����J2���늾��a�����D�ӑT����k���S�h��(�����D���S��늾��a���S)�ď��Ԅ��ȣ�
�����в��ͳ���늄әC����ԭ���������]Ħ�������f���Wģ��[6]�����Եõ�늙C�����D�أ�
ʽ�У�FN��늙C���A���o����raV�鶨�D��Ħ�����|�ӵ�ƽ���돽���̞�Ħ��������������=��(��s-��r)����ه�ڶ��D�ӱ���������ٶȣ���s�鶨�ӱ����|�c�������ٶȣ���r���D�ӵ�Ħ���Ӿ��ٶȡ�
1��2�����^��
���ڈD1�����Wģ�ͣ��ɽ���ϵ�y�����^�̵��\���ַ��̣�
ʽ�У�TL��늙C��ؓ�d���أ�d����d����늙C��늾��a��������ϵ����
��ʽ(1)����ʽ(2)��������������  �ɵã� |