����늄�(d��ng)�C(j��)ʸ��ģ�͵�Matlabܛ�����漰�䑪(y��ng)��
���գ�ꐄ�
(�Ͼ����̌W(xu��)Ժ�����K�Ͼ�211167)
ժҪ������Matlab simulink�����ˮ���늄�(d��ng)�C(j��)ʸ�����Ʒ��������������(g��)�D(zhu��n)�Ӵ��Ӌ(j��)��ģ�ͼ�����늄�(d��ng)�C(j��)ʸ��ģ�ͣ�̽ӑ���@Щģ�͵Č�(sh��)�Hʹ�Æ��}���鷽��̌W(xu��)�͌W(xu��)����(sh��)�(y��n)ʹ�ã�߀���@Щģ���M(j��n)���˷��b��
�P(gu��n)�I�~���D(zhu��n)�Ӵ��Ӌ(j��)��ģ�ͣ�����늄�(d��ng)�C(j��)ʸ��ģ�ͣ�Mat1ab��Slmullnk
�ЈD���̖��TM343 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004��7018(2008)0lһ0031��04
Oǰ��
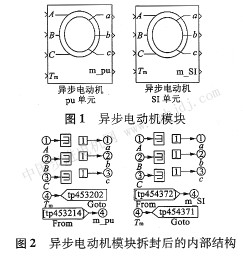
Ŀǰ������늄�(d��ng)�C(j��)����ϵ�y(t��ng)�M(j��n)�з���r(sh��)�����õĮ���늄�(d��ng)�C(j��)ģ�Kȡ��Matlab slmulink���еĮ���늄�(d��ng)�C(j��)ģ�K����Dl��ʾ������늄�(d��ng)�C(j��)ģ�K�������ă�(n��i)���Y(ji��)��(g��u)��D2��ʾ���ĈD2�˂�����������늙C(j��)��Փ�Į���늄�(d��ng)�C(j��)ģ�K��(n��i)�ڽY(ji��)��(g��u)���oՓ�nj����о�߀�nj��ڽ̌W(xu��)���f������ʮ�ֲ���ġ��W(xu��)���o�����̲��ϵĮ���늄�(d��ng)�C(j��)������Փͬ����ģ�K�Y(ji��)���������������о��ߣ��t�o���x���{(di��o)��ģ�K�Y(ji��)��(g��u)������(sh��)ֵ��
��ˣ�����Matlab simulink�����ˮ���늄�(d��ng)�C(j��)ʸ�����Ʒ��������������(g��)�D(zhu��n)�Ӵ��Ӌ(j��)��ģ�ͼ�����늄�(d��ng)�C(j��)ʸ��ģ�ͣ��ɹ��̌W(xu��)��������r(sh��)ʹ�á���ݔ�붨�����������늄�(d��ng)�C(j��)����(sh��)����r�£����Եõ�����������ݔ�����Σ����̲��г�����ַ����D(zhu��n)׃��ֱ�^����������ݔ�����Σ���(hu��)�@�ø��õĽ̌W(xu��)Ч�����@Щģ��߀�����Á��о�����늄�(d��ng)�C(j��)���^���^�̣�Ҳ�����Á혋(g��u)�����N����ϵ�y(t��ng)������ֹʹ���^���Ќ��@Щģ�K�M(j��n)���`�ģ����@Щģ�K
�M(j��n)���˷��b��������������(y��ng)���f�����Է��㌍(sh��)�Hʹ�á�
1����늄�(d��ng)�C(j��)ʸ��ģ�ͷ���
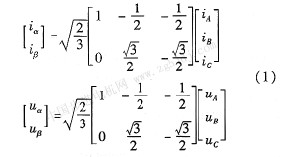
���ծ���늄�(d��ng)�C(j��)�Č�(sh��)�H����ģ���������Ą�(d��ng)�B(t��i)��(sh��)�W(xu��)ģ����һ��(g��)���A���Ǿ��ԡ���(qi��ng)��ϵ�ϵ�y(t��ng)��ֱ�ӷ�����Ӌ(j��)���@�ӵķ��̽M��ʮ�ֲ���ģ��˂��о��˲�ͬ�ĺ�������������ʸ��׃�Q����������һ�N��ʸ��׃�Q����Ŀ����ģ��ֱ��늙C(j��)�Ŀ��ƙC(j��)�����팦����늄�(d��ng)�C(j��)�M(j��n)�п��ƣ������˼���ǣ������M(j��n)������(bi��o)׃�Q�����������oֹһ�����oֹ׃�Q(3��2׃�Q)�������ཻ�����iA��iB��iC��׃�Q�ɶ����oֹ����(bi��o)ϵ�ϵĽ������i����i���������oֹ�������D(zhu��n)׃�Q(2��2׃�Q)���������oֹ����(bi��o)ϵ�ϵĽ������i����i��׃�Q�ɶ������D(zhu��n)����(bi��o)ϵ�ϵĽ������id��iq������d�S�����D(zhu��n)�Ӵ��?zh��n)����ķ�����q�S���D(zhu��n)���D(zhu��n)�����D(zhu��n)90�������w����(bi��o)׃�Q���̽M���¡�1.1�����oֹ-�����oֹ����(bi��o)׃�Q���̶����o������(bi��o)ϵ�Q���-������(bi��o)ϵ,ȡ �S�cA�S�غ�,���ÿ����ʲ�׃��ԭ�t,�t:
1.2�����oֹ-�������D(zhu��n)����(bi��o)׃�Q����
�������D(zhu��n)����(bi��o)ϵȡM-T����(bi��o)ϵ,M�S�c���S�ĊA�Ǽ���ս�.
1.3�������D(zhu��n)����(bi��o)ϵ�µĴ�朡�늉���늴��D(zhu��n)�ط���
1.3.1 ��朷���
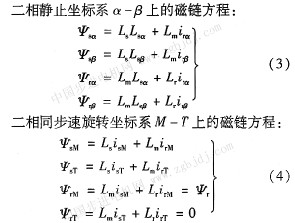
�����oֹ����(bi��o)ϵ��-���ϵĴ�朷��̣�
ʽ�У�Lms��������������(bi��o)ϵ�ж����D(zhu��n)��ÿ���@�M��****���У�
Lm�������������D(zhu��n)��ͬ�S��Ч�@�M�g�Ļ��У� Lm=3/2Lm;
Lm�����������ӵ�Ч�����@�M���ԸУ�Ls=Lm+L1s;
Lm�����������ӵ�Ч�����@�M���ԸУ�Lr=Lm+L1r;
1��3��2늉�����
�����oֹ����(bi��o)ϵ��-���ϵ�늉����̣�
����ͬ�������D(zhu��n)����(bi��o)ϵM-T�ϵ�늉����̣�
|