���ڸ��M����z���㷨�����şoˢֱ��늄әC
�{��ϵ�y(t��ng)�ă�(y��u)���OӋ
�� �x
(���A��W���Ĵ��ɶ�610039)
ժҪ�������şoˢֱ��늄әC���鱻�،����\��һ�N���M�Ļ���z���㷨�����ٶȿ������ą���(sh��)�M���˃�(y��u)���OӋ��ԓ�㷨ᘌ���Ҏ(gu��)�z���㷨����Ч�ʵͺ������Ք���ȱ�c��ͨ�^���μ��η��c���m���z���㷨��M���γ���һ�Nȫ�փ�(y��u)���㷨�����M�з����������C���C���˲���ԓ�㷨�_�����Ã�(y��u)���{�����ܵ�Ŀ�ģ�
�P�I�~�����şoˢֱ��늄әC�����M����z���㷨������
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2008)01��0037��03
0 ����
���şoˢ�A��늄әC���øߴ��ܷe�������w��ţ����нY�����Ρ��w�eС�������p���D�ӑT��С���ӑB(t��i)���Ժá�늚�r�g����(sh��)С���D�ز���С��������(sh��)�ߡ�푑���ȃ�(y��u)�c���ڸ߿��ƾ����c�߿ɿ��Եȷ����@ʾ���ă�(y��u)Խ���ܣ�ʹ�����şoˢֱ��늄әC�{��ϵ�y(t��ng)���ɞ鮔���{���I���о��еğ��T�n�}��
1���şoˢֱ��늄әC�ٶȿ������ă�(y��u)���OӋ
1��1�ٶȿ���ϵ�y(t��ng)�Ę��ɼ�����ԭ������
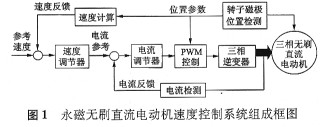
���şoˢֱ��늄әC�ٶȿ���ϵ�y(t��ng)����������D�كɂ����ƭh(hu��n)��(ji��)���ɣ���D1��ʾ����������h(hu��n)�����(n��i)�h(hu��n)�����ٶȭh(hu��n)�t������h(hu��n)�������ٶ��c�ٶȷ������γ�ƫ���(j��ng)�^�ٶ��{��(ji��)���{��(ji��)��a(ch��n)����������������c�����������ƫ�(j��ng)�^����{��(ji��)���{��(ji��)���γ�PWMռ�ձȵĿ�����ȥ����������׃���������Ķ����F(xi��n)늄әC���ٶȿ��ơ�Ҫ�����������õ��ٶȿ���ϵ�y(t��ng)���P�I��Ҫ���ø��õă�(y��u)���㷨���ٶ��{��(ji��)����PI����(sh��)�M�Ѓ�(y��u)���OӋ�����đ��ø��M�z���㷨���ٶ��{��(ji��)����PI����(sh��)�M�Ѓ�(y��u)����
1.2��������(y��u)��ģ�͵Ľ���
���ڸ��M�z���㷨��(y��u)�����ٶȿ���ϵ�y(t��ng)ģ�ͽM����D2��ʾ��
������şoˢֱ��늄әC�ٶȿ���ϵ�y(t��ng)��(������)��ts(�{��(ji��)�r�g)�ɂ�����ָ�ˣ����ٶ��{��(ji��)����(y��u)���OӋ���΄ձ��ǾC���{������ָ�ˣ�ʹ֮�_���Ñ��ܝM���****�Y�����҂������{��(ji��)���ij�Ҏ(gu��)�����OӋ������Kp��Ti�ăɂ�����(sh��)ֵKp��Ti��Ȼ���ڴ˃ɂ���(sh��)ֵ�������ɳ�ʼ�NȺ���@�N�����ɳ�����ó�Ҏ(gu��)�����OӋ���ĺ����(n��i)�ˣ�ʹ�������g���sС���Ķ���Ѹ��������****�⡣
�z���㷨���{��(ji��)�΄���ʹ����ָ��J��С��ͬ�r���˱��ⳬ�{�����ĵ�����ָ�ˣ���ITAE����ָ�˵Ļ��A���M���˸��M�������ˑ��P���ܣ������{������****ָ�˵�һ헣����ǵõ�****������ָ��J��
ʽ�У�e(t)��ϵ�y(t��ng)�`�e(t)=r(z)һy(t)��w1��w2��w3��w4���ֵ����w4��w1��u(t)�������ݔ����tu�������r�g��
�C�����������ǵõ��ٶ��{��(ji��)���ă�(y��u)��ģ�ͷ��̞飺
���У��Ȟ�[O��1]��(n��i)�x���Ĕ�(sh��)��Kp��Ti�ǰ��ճ�Ҏ(gu��)�����OӋ���OӋ�����ٶ��{��(ji��)������(sh��)ֵ��
1��3���M�z���㷨���㷨�OӋ
ᘌ������z���㷨��ȱ�ݣ�ͬ�rҲ����ʹ�z���㷨�����ڟoˢֱ��늄әCϵ�y(t��ng)�r����****���ܣ������ڷ������N���ø��M�z���㷨�Ļ��A�ϣ���ȡ�������ĺ����(n��i)�ˣ��γ���һ�N���M�Ļ���z���㷨�������şoˢֱ��늄әC�ٶ��{��(ji��)����PI����(sh��)�M���˃�(y��u)���OӋ��ȡ���˝M���Ч����
1��3��1����(sh��)���a
���ڌ����şoˢֱ��늄әC�ٶȿ������M�Ѓ�(y��u)���OӋ���|����һ������S���߾���Ҫ��Ĕ�(sh��)�W |