����ģ�����Ƶ�����ͬ��늄әCֱ���D�ؿ���ϵ�y
���ţ����l��������
(�������I��W���������710072)
ժҪ��ᘌ�����ͬ��늄әCֱ���D�ؿ���ϵ�y���D�غͶ��Ӵ���}�ӆ��}�������һ�N����ģ���������{��PWM��̖ռ�ձȵ�����ͬ��늄әCֱ���D�ؿ��ƵIJ��ԣ����ڂ��y����ͬ��늄әCֱ���D�ؿ��ƵĻ��A�ϣ���ģ��������������yDTc�еĜ��h���^���Ϳ��g늉�ʸ����B�x���������ֿ���Ҏ�t���ԜpС�D�غʹ���}�ӡ����^���棬�Y����C�˴˷�������Ч�ԡ�����ᘌ�����ģ��Ҏ�t�픵��������ϵ�y���s�@һ���}��ʹ���˶��Ӵ�朽�ӳ��ķ��������p����ģ��Ҏ�t�Ĕ��
�P�I�~������ͬ��늄әC��ֱ���D�ؿ��ƣ�ģ�����ƣ�ռ�ձȣ��D���}��
�ЈD���̖��TM34l �īI���R�a��A ���¾�̖��1004��7018(2008)01��0040��03
0�� ��
ֱ���D�ؿ���(DTc)����늉����gʸ��������Փ�Ļ��A֮�ϣ��^ʸ�����Ƽ��g��lչ�����ľ��и����ܵĽ���׃�l�{�ټ��g[1]������ͬ��늄әC(PMsM)���нY�����Ρ��w�eС�������p��Ч�ʸߡ������ߡ��D�ӑT��С�ȃ��c��ʹ��Խ��Խ��đ����ڸ�����Ҫ��Ĉ���[2]���b��ֱ���D�ؿ����ڮ���늄әC���������õĿ������ܣ�����팢ֱ���D�ؿ��Ƒ���������ͬ��늄әC�ѳɞ��\�ӿ��Ƶ�һ���о����c��
ֱ���D�ؿ�����������õĜ��h���^�����^����ԟo�����_�^���D���`��ʹ���`�����ͬ��늄әCֱ���D�ؿ���ֻ��ʹ��ʹ�D�����D���D��늉�ʸ������ˣ�����ϵ�y���D���}�Ӻʹ���}���Ȟ�ͻ��[3]�����˜pС�}�ӣ����������һ�N����ģ�������{��PwM��̖ռ�ձȵ�����ͬ��늄әCֱ���D�ؿ��Ʋ��ԣ��������D�غʹ�朵�ƫ���OӋһ��ģ��������������ÿ���ɘ����ڵ�PwM��̖��ռ�ձȣ��ԜpС�D�غʹ���}�ӡ��������OӋģ���������r�������\���˶��Ӵ�朽�ӳ��ķ������p����ģ��Ҏ�t�Ĕ�����
1����ͬ��늄әCֱ���D�ؿ���
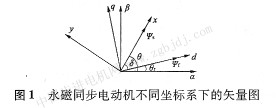
ֱ���D�ؿ��Ʋ���hang-bang���Ƶ��xɢ���h���Ʒ�ʽ�����D�غͶ��Ӵ�����鱻�،����D�غʹ���`��ͨ�^���h���^���a��PwM��ֱ̖�ӿ�����׃�����_�P��B[4]���Dl������ͬ��늄әC��ͬ����ϵ�µ�ʸ���D��
�D1�еĦĞ鶨�Ӵ�朦�s���D�Ӵ�朦�q֮�g�ĊA�ǣ������ǡ���ϵ�y��һ���D���·����\�Еr���IJ�׃����ϵ�y��B��׃�r�����ڲ���׃����
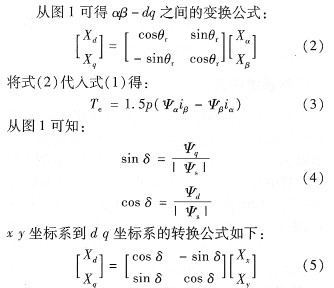
��dq�����£�����ͬ��늄әC���D�ع�ʽ��[2]��
ʽ�У���d����q���քe�鶨�Ӵ�朦�s��d�S��q�S�ϵķ�����id��iq�քe�鶨�������d�S��q�S�ϵķ�����p��늙C�O������
���У�x�ɷքe��ʾ�����늉���늴š���ʽ(5)����ʽ(1)�ɵõ���
���У�Ld��Lq��늸�L�քe��d�S��q�S�ϵķ�����
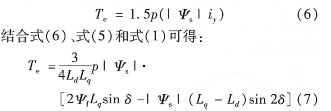
�����[�Oʽ����ͬ��늄әCLq=Ld����ʽ(7)�Ɍ��飺
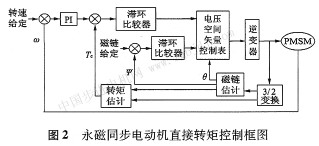
��ʽ(8)��֪�������Ӵ�朲�׃���{�ٕrֻ���׃6�Ƕȱ�ɸ�׃�D�صĴ�С��  ֮�g׃���r���S���Ƕȵ������D�����ӡ�ֱ���D�ؿ��ƾ����x����m��늉����gʸ�����{�����Ӵ�朵�λ�ã����_������6�Ƕȵ����á����D2��������ͬ��늄әCֱ���D�ؿ��ƿ�D�� 2����ģ�������{��PwM��̖ռ�ձȵ�����ͬ��늄әCֱ���D�ؿ���ϵ�y
2��1����ϵ�y�Y��
�����ڂ��yDTc�Ļ��A֮�ϣ������h���^���Ϳ��g늉�ʸ����B�x������ģ�����������棬������һ���Ķ��Ӵ�朽�(Ŀ)�����ȣ���ԭ����һ��늉�ʸ����̖�ü��ֺ�Ďׂ�늉�ʸ����̖���棬���_���{��PwM |