�{�l�{���{��ij���늄әC�����·
ʷ����
(���ϿƼ���W���������471003)
ժҪ��ᘌ�����늄әC���I��Ҏģ���õ����o����һ�N���{�l�{������ij���늄әC�ͳɱ��ӿ����·����������Y��������ԭ�������M���ˌ����C��Ч�����á�
�P�I�~������늄әC�������·��Lc�C��
�ЈD���̖��TM35 �īI���R�a��A ���¾�̖��1004��7018(2008)01��0046һ04
O�� ��
����늄әC��һ�N���͵��\�ӿ��ƈ���Ԫ�������в�ͬ�ڂ��y늙C�Ĺ���ԭ���c�Y��[1,2]���c���y늙C��ȣ�����늄әC�нY�����Σ�����Ҫ��Ȧ�������p���Ӳ����Π��`��o�����o�ň�ݗ��ɔ_�������|���ȴ�λ��ֱ���ӵ��T�����c���@Щ���cʹ�ó���늄әC�ں��պ��졢�C���ˡ����ܼӹ��O�䡢�t���x�������﹤���O��ȸ߶��\�ӿ����I�����������܇��ӵ���ͨ�\�ӿ����I�������V���đ���ǰ��[3,4]��
Ŀǰ������늄әC�ӿ����·�Y���^����s[1-4]��һ���̶����������乤�I�����á����������һ�Nȫ�����͵ij���늄әC�ͳɱ��ӿ����·��ԓ�·ݔ������̖���l�ʡ���ֵ����λ�����{��������һ�Nͨ�����·�����ڲ�ͬ������ϡ�
���Ľo�����·�Y���������˹���ԭ�������M���ˌ����C��Ч�����á�
1�{�l�{���{��ij���늄әC�����·
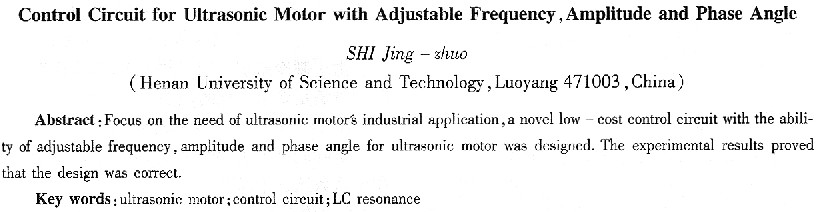
�D1�鱾����������늄әC�ӿ����·�Ļ����Y����D���D���_�P����(MOSEET)�B�Ӟ���Y������ֱ��늉��D�Q����l������늉���ʩ�����ɴ�ƥ��늸��c����늄әC�е����ԉ���մ�Ƭ���ɵ�Lc�C���·����ƥ��늸п�����Ч�؞V��������늉��еĸ��l�C���ɷ֣����F���Ƶ����Ҳ��ӡ�
�@���ƥ��늸�ֵ���OӋ�����ЃɷN��ͬ�ķ�����һ������߳���늄әC��늉���Ŀ�ģ��OӋ��ƥ��늸�ֵ��ʹ��Lc�·�ڳ���늄әC�����l�ʰl���C��늸�Lȡֵ�飺
ʽ�У�f�鳬��늄әC�����l�ʣ�c�鳬��늄әCһ��ĵ�Ч��ݡ�ͨ������늄әC�����l�ʶ�����һ���_����ֵ�������ڿ�������늄әC�Cе�����l�ʵ�һ��С������׃���ģ��Á�Ӌ��늸�ֵ�Ĺ����l�ʔ�ֵ����ȡ�鳬��늄әC�Cе�����l��ֵ��
����Lc�C���·��֪����Lc�·���������C���l�ʕr������늄әC(����)��늉�����������_����****ֵ��ԓ****ֵ���F���Ե����C���l�ʵĹ����c�����˳������Lc�C�������������߳���늄әC��늉�������ȡ늸О�С��ʽ(1)Ӌ��ֵ��ijһ��ֵ�����w��ֵȡ�Q��늙C��늸Ѕ�������ֲ�������
�������������OӋ��ƥ��늸�ֵ����ʹ��LC�·���������C���B����������늄әC����ĵ�Ч��ݲ�����ȫһ�£�����ƥ��늸е��@��Ҳ�����S����������أ�ʹ�Ì��H늸�ֵ�cӋ��ֵ(����ֵ)�в�e�������^���У�늙C��Ч��ݺ�ƥ��늸еĴ�СҲ���S�h�����ذl��׃�����@Щԭ��ʹ�Ã���Lc�·�Ĺ�����B��һ�£����³���늄әC�����늉���ֵ��һ�¡�ͬ�r��Lc�·�����ã�ʹ늙C��늉�����λ�cʩ����Lc�·�ɶ˵���늉���λ��һ�£����������ơ�������Lc�·�Ĺ�����B��һ�£��ڌ��³���늄әC�����늉���ֵ��һ�µ�ͬ�r��Ҳ�����������Ʋ�һ�£�ʹ��늙C�ˌ��H��늉�����λ���c����ֵ��ͬ��
��ֵƫ���������λƫ������˳���늄әC����ϵ�yǰ��ͨ���еĿ��ƷǾ��ԣ�ʹ�ÿ����Mһ�����s��������Dz����ք��{�����@Щ�Ǿ�������Ҳ�������{���y�ȡ�
���˱����������}����ƥ��늸�ֵ���OӋ���Բ�����һ�N����������Lc�C���·�ķ��l�����l���Կ�֪����Lc�·�C���l�ʸ��������ֵ�����Ƶ�׃���ʴ���ƫ�x�C���l���^�h�ą^�����ֵ�����Ƶ�׃����ҪС�öࡣ����OӋ��ƥ��늸е�ȡֵ��ʹ��LC�·������ƫ�x���C���B�^�h�ą^����ô����ʹ����Lc�·���C���l�ʲ�ͬ��������B��һ�£������µă����늉���ֵ����λƫ��Ҳ��С�öࡣͨ�����@�ӵ�늸�ֵ����ͨ�^��ʽӋ��õ���
|