�߾��ȷ������w݆�����c����
�����1,2���躣��1����һ�x1���S����1,2
(1�Ї��ƌWԺ�L����W���ܙCе�c�����о����������L��130033��2�Ї��ƌWԺ�о���Ժ������100049)
ժҪ���������w݆�\�еăɷNģʽ����������ģʽ���п��Ʒ��㡢���ȸߵă��c���ڴ˻��A��������w݆�ӺͿ��Ʒ�ʽ��ϵ�y�ľ��w���F�����������@�N�ӺͿ��Ƶķ�ʽ�����о��ȸߡ����Ʒ����Ч�ʸߵȃ��c��
�P�I�~���������w݆�����·������
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004-7018(2008)01��0050��03
O�� ��
�������w݆�������S�����������ˑB���ƵĈ��ЙC����������������ЙC���������п��ƾ��ȸߡ������L�����c�����������ϵ�y��һ�����Эh�����ЃɷN�����Ĺ���ģʽ[1]��һ�N��Ҫ���w݆���D���c��ݔ�������̖�ɱ����Pϵ�����D�����鷴���������]·���ƭh�����Q���ٶȹ���ģʽ����һ�N��Ҫ���w݆�ķ����������c��ݔ�������̖�ɱ����Pϵ���Q�����ع���ģʽ��
�w݆�ٶȿ���ģʽ�ă��c���S��Ħ���ȸ��N�_�������ǃ�������Ӱ푿�ͨ�^�]�h�������õõ����ƣ�ȱ�c����Ҫ���Ӹ߾��ȵĜy���b�ã��ڌ��H���õ��w݆�b���������Ϊ��O�ø߾��ȵĜy�ق�����[1]�����������w݆�ğoˢֱ��늄әC�ēQ���}�_���F�y�١�����늙C�Q���}�_���ܵ����ƣ�Ҫ���F�߾��ȵ��D�ٜy���Ǻ����y�ģ��e���ڵ�����r�ʴ_�y���D�ٸ������y���w݆���ؿ��Ƶă��c�ǿ��ƺ��Σ�������ֱ̖�ӌ������أ����F�����N�ɔ_�ĵ����͌��l���ˑB�Ŀ��ƣ�ȱ�c���w݆늙C��늴�ݔ�����غ��S��Ħ���ȸ��N�_�����ع�ͬ�������l���ϣ�ʹݔ�������c������̖ƫ�xҎ���ı������w݆���D�ӑT�������w�D�ӑT��С�ö࣬�����S��Ħ�����ر��^С����ˌ��w݆���D���M�п��Ʊ�Ҫ�Բ������������ģʽ�Ļ��A�ϼ����S��Ħ�������a��[2]����ô����ģʽ�����ܕ����á���ˣ�������Ҫ�о��߾�������ģʽ������݆���ӺͿ��ơ�
1���·
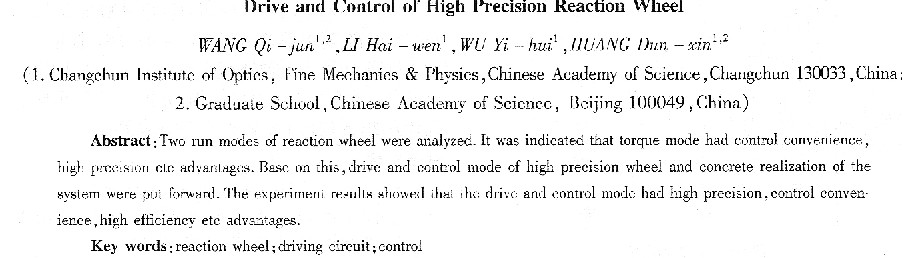
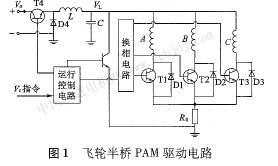
�������w݆���ɟoˢֱ��늄әC�ʹ�T����݆�ӽM�ɣ�����о��������w݆�����·�䌍�����о��oˢֱ��늄әC�����·���F�ڏV��ʹ�õ��w݆�͟oˢֱ��늄әC���·��Ҫ��PAMģʽ������·[3]����D1��ʾ��PwMģʽȫ����
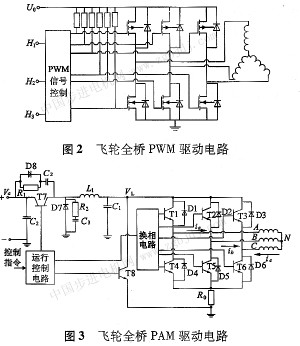
�·[4]����D2��ʾ��PAMģʽ������·�����ӷ�ʽ���Ρ��ɿ��Ըߵȃ��c�����ǣ��@�N�ӷ�ʽ��늙C�Q���r�]�ж��O���m����·�������ʹܛ_���^��ÿһ���r��ֻ��һ���@�Mͨ늣�늙CЧ�ʵ͡�PwMģʽ���·����Ч�ʸߵă��c�����ǣ�����ͨ�^�{��ռ�ձȁ��{���@�M�ϵ�����������С�ĕr��ռ�ձ��^С��������Ӵ�ȡ������鷴�����r���^��ļy��ʹϵ�y����׃�ͬ�r�@�N��ʽ����z�y�韩����Ҫʹ�����������������������w�e���y���ڿ��g�b���в���[5]��ᘌ�����ɷN���·�ĸ��Ѓ�ȱ�c����Ҫ�ҵ�һ�N��늙CЧ�ʸߡ�늙C���ز���С������ɘӷ�������·���C�Ͽ��]����PAMȫ�����·����D3��ʾ��늙C���D�ز�����Ӱ�늙C���ƾ��ȵ���Ҫ�h�����D�ز��ӷ֞�Q���D�ز��ӺͷǓQ���D�ز��ӣ����ГQ���D�ز���ռ��Ҫ���ء�PAMȫ�����·�Q�����g�D�ز��ӷ������£�
�Q���r�����ڃɷN��r��һ��������ɂ��Ϙ��֮�g�Q�������ǃɂ����֮�g�Q���������@�ɷN��ʽ�nj��Q�ģ��������Ϙ��֮�g�Q���M�з��������OA���˳���B���_ͨ��Tl�P��,13��ͨ(��D3��ʾ)�����ړQ���r�g�̣ܶ������J��A�෴늄ӄݞ�E��B�෴늄ӄݞ�E��c�෴늄ӄݞ�һE���г��˕r���·���̞飺
�����Ϸ�����֪��ֻҪ���C�ǓQ�����ic���ֲ�׃����r�£�늴��D�ز�׃��늴��D�ز��l���D�ز��ӣ�Ҳ����Ҫ���CA��������½����ʺ�B���������������һ�ӡ���ʽ(1)һʽ(4)���Եõ���
|