����ϵ�yӲ���ڻ�·���r���挍�ƽ�_��dSPACE���F
�οƣ����l��������
(�������I��W���������710072)
ժҪ������dSPACE����������ϵ�y������һ��늄��ŷ�ϵ�yӲ���ڻ�·���r���挍�ƽ�_���о��˻���dSPACEϵ�y���\�ӿ���ϵ�y���������挍�ƽ�_��ϵ�y�Y�����_�l���̣��OӋ��һ�N�m���ڶ�N���늙C��ͨ��늙C���b�ã������ԓ���r���挍�ƽ�_���о��˟oˢֱ��늄әC�ŷ�����ϵ�y���OӋ����ͨ�^���Y����C��ϵ�y�OӋ�ĺ����Լ����Ƶ���Ч�ԡ��о��ɹ�������dSPACE���r����ϵ�y���\�ӿ���ϵ�y���о��c�_�l�ṩ��һ�����õČ��ƽ�_�����������о�������Ч�ʡ�
�P�I�~���\�ӿ��ƣ����r���棻Ӳ���ڻ�·��dSPACE
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004-7018(2008)04��0028��04
����
늙C�Ĕ��Wģ����һ�����A���Ǿ��ԡ�����ϵĕr׃��׃��ϵ�y�����Ҍ��H�Cеؓ�dҲ�����������^��Ħ���ȏ��Ǿ������ԣ����ԣ��ڂ��y�ļ������x�������о��У�늙C��ؓ�dģ�Ͷ�����һ�����O�l���µĺ���ģ�ͣ��c���H������ڲ����һ���棬�������x������Ԫ�����]���������H̎�������\���������惦�������ơ��Д༰I��O�ӿ��·늚����Ե��T�����ء���ˣ������@�N�����OӋ�õ��Ŀ����㷨�ڌ��H�����Пo��ȡ������Ч�������ڲ��Æ�Ƭ�C��DSP�Ĕ����\�ӿ���ϵ�y�_�l�^���У����H��Ҫ�ֹ����������㷨��������Ҫ�_�l�����Ľӿ��·���әz�y�b�ã��_�l�����L���؏��Թ����ࡣ�F�����漼�g�İlչ���������}�Ľ�Q�ṩ�˺ܺõĹ��ߡ�dSPACE���r����ϵ�y���F���cMAT-LAB��Simulink�o�p朽ӣ���֧�ִ��a���Ԅ����ɣ����F�ˏĻ���MATLAB��Simulink�ļ������x�����浽Ӳ���ڻ�·�İ����팍�r����Ŀ����^�ɡ�Ŀǰ��dSPACE���r����ϵ�y���\�ӿ���ϵ�y�_�l�������ڇ����ѽ��õ��ˑ���[1-5]�����ڇ��ȃH�ИO�ٔ���ԺУ�_չ���@������о�[6-8]��
���ĽY��dSPACE���r����ϵ�y���о����\�ӿ���ϵ�yӲ���ڻ�·���ƽ�_��ϵ�y�Y����ͨ��늙C���b�õ����ơ��ڴ�ƽ�_���о���ϡ�����şoˢֱ��늄әC�ŷ�����ϵ�y�����o���������Č��Y����
1����dSPACE���\�ӿ��ƌ��r����ƽ�_
1��1���r����ƽ�_ϵ�y�Y��
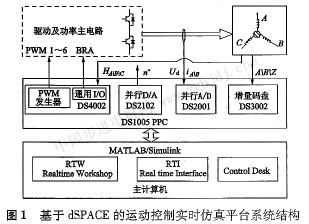
�ļ�����̎�����cݔ�롢ݔ���ӿڵĆΰ�ϵ�y(DSll03��DSll04)��������PowerPC̎������������̖̎��оƬ�Ę˜ʽM��ϵ�yDSl005��DSl006��dSPACE���r����ϵ�y���\�ӿ���ϵ�y���_�l�ṩ�ˏ����Ӳ��ϵ�y���S����ܛ���YԴ����ϵ�y����DSl005PPC�M��ϵ�y��̎��������IBM PowerPC750GX�cTMS2407����̎��оƬ��ͨ�^�Ȳ�32λPHS�����c���ӿ�ģ�K���B�ӡ�������ӿ��·�У�16λ5·���ٲ���DS2001ģ���D�Qģ�K���D�Q�r�g��̿��_��0��9��s�����C�ˌ���������ĸ��١�ͬ���ɘӡ�ͬ�r��DS4002��ܔ���IYOģ�K���F32·������L��Oͨ����ѭ�h�ɘӣ�������������8·����I��Oͨ�����FPWM�����ɡ�������̖�İl�������r��Ӌ���ȹ��ܡ����⣬����DS3002����ʽ���a�P�ӿڣ����٫@ȡ늙C�D��λ����̖�����Fλ�á��D�ٵ��]�h���ơ���D1��ʾ��
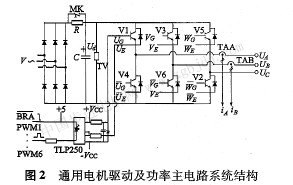
ԓ�Ӽ��������·����D2��ʾ���~�����ʞ�3 kVA���������ӟoˢֱ��늄әC���Б�ʽ����
늄әC��ͬ��늄әC�ȣ���Ҫ����������ȫ�������·��IGBT��׃���·��PWM���^����(�D��δ����)�����x�Ŵ��·���z�y�����o�·�����֡����У�6·��PWM�{����̖��Ӳ�����^�����·��(���^�r�gt=5��s���ٽ�T12250���x�Ŵ�����IG��BTģ�K��ͨ�ࡣͬ�r��ᘌ�늙C�\���^���п��ܰl�����^�����^���ȹ��ϣ�ϵ�y���r�z�y���·ݔ����U��V��������iv��iv��ĸ��늉��^��һ�����ϰl����������PWM���i��̖BRA�Þ���ƽ��ʹȫ��IGBTģ�KѸ���P�ࡣ���⣬���ֹ늙C���ӕr������_����IGBT�^��Ȇ��}��ϵ�y�OӋ���ӕr���ӡ�IGBTģ�K���^��z�y�����o��늙C��ͣ���ܺ��Ƅӡ����Ϗ�λ�������o�����ܡ�
1��2ϵ�y�_�l����
����dSPACE���\�ӿ���ϵ�y���������挍�ƽ�_��ܛ���_�l������D3��ʾ����Ӌ��C��Ҫ�M��Matlab��Sireulink���\�ӿ���ϵ�y�ļ������x�����漰�\��C(mtrodesk�Ȍ��yԇܛ�������x������Y��������MATLAB�Č��r������(RTW)�cdsPAcEϵ�y�Č��r�ӿڎ�(RTI)���㷨 |