���\(y��n)�C(j��)�����(q��)��ϵ�y(t��ng)���O(sh��)Ӌ�c��(sh��)�F(xi��n)
���S܊��ꐂ���������
(�����I(y��)���g(sh��)�W(xu��)Ժ���V�|����518055)
ժҪ���U����Robocon��ِģ�K���\(y��n)�C(j��)�����(q��)��ϵ�y(t��ng)���O(sh��)Ӌ��ԓ�O(sh��)Ӌ�����(q��)��ϵ�y(t��ng)�C(j��)е���ֵ�܇�d�C(j��)��(g��u)�����ߙC(j��)��(g��u)���O(sh��)Ӌ���Լ�늿�ϵ�y(t��ng)���O(sh��)Ӌ��늿�ϵ�y(t��ng)���O(sh��)Ӌ�����������������O(sh��)Ӌ�����(q��)��݆��늙C(j��)�(q��)�Ӻ�܇�d�C(j��)��(g��u)늙C(j��)���(q��)���O(sh��)Ӌ����(sh��)�`�������C(j��)�����O(sh��)Ӌ�������Σ���(sh��)�ÿɿ����_(d��)�����A(y��)|ʮ��Ч����
�P(gu��n)�I�~���C(j��)���ˣ��(q��)��ϵ�y(t��ng)��늿�ϵ�y(t��ng)
�ЈD���̖��TM33��TM383��4 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004-7018(2008)04��0032��03
O����
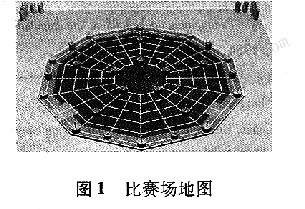
Robocort�遆�ޏV���ҕ(li��n)�ϕ�(ABU)�e�k�ā�����ȴ�W(xu��)���C(j��)���˴�ِ�����}�Ǹ���(j��)�S����ָ��܇�Ĺ����ƶ��ġ��A��֮�⡱����ِҎ(gu��)�t��Ҫ��(n��i)�����£��t;G꠷քe�����քәC(j��)����(�����S��)���ԄәC(j��)����(��������)��ľ�K(�tꠞ�tɫģ�K���Gꠞ�Gɫģ�K)�ŵ�����(zh��n)܇��(���ϵĶ���)�ϡ���ľ�K�ŵ�����(zh��n)܇��픲����ռ�����@�v����(zh��n)܇�������÷֣���(n��i)Ȧ����Ȧ����Ȧ��(zh��n)܇�ķ�ֵ�քe��3�֡�2�ֺ�1�֡�****ռ�б�ِ���������3�v����(zh��n)܇��������V���Ρ�ָ��܇������ǫ@��ꠡ��ڃ��δ���ɡ�ָ��܇������r�£��÷ֶ��꠫@�١�������ِ����3��犡�������Ҫ�U����У�����ęC(j��)е�ֵ�������ģ�K���\(y��n)�C(j��)����(���ҷ���ِ�е��ԄәC(j��)����)�(q��)��ϵ�y(t��ng)���O(sh��)Ӌ��
1�(q��)��ϵ�y(t��ng)�Y(ji��)��(g��u)�O(sh��)Ӌ
�����\(y��n)�C(j��)�����(q��)��ϵ�y(t��ng)�C(j��)е�Y(ji��)��(g��u)��Ҫ�������ߙC(j��)��(g��u)��܇�d�C(j��)��(g��u)�ɲ��֡�
1��1���ߙC(j��)��(g��u)�ĽY(ji��)��(g��u)�O(sh��)Ӌ
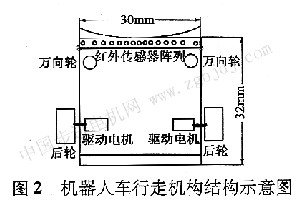
���ߙC(j��)��(g��u)����݆ʽ�(q��)�ӷ�ʽ����Y(ji��)��(g��u)����ʾ��D��D2��ʾ������Ҫ������ʹ�C(j��)���˰����O(sh��)�������_(d��)�A(y��)�ȵ�λ�á����Ƀɂ�24 V�ŷ�ֱ��늄әC(j��)�̓ɂ��f��݆�M�ɡ��ɂ�ֱ��늄әC(j��)���b�ڙC(j��)���˵ĺ��քe�(q��)�Ӄɂ���݆����C(j��)�����Є��ṩ������܇݆���ܛ�����z���ϣ�������܇݆Ħ��ϵ��(sh��)���ɂ��f��݆���b�ڙC(j��)���˵�ǰ������C(j��)���˱��w�ṩ��(w��n)����֧�Σ������S�(q��)��݆���\(y��n)�ӷ����\(y��n)�ӡ��ڿ����ϣ��҂�ͨ�^���b��܇ǰ�ļt�ⷴ��ʽ��������У��z�y�����ϵİ�ɫ����(d��o)�����Էքe���ƃɂ���܇늙C(j��)���D(zhu��n)�ٲ�Ķ����ƙC(j��)���˰�����Ҏ(gu��)����·�����M(j��n)��
1��2܇�d�C(j��)��(g��u)�(q��)��ϵ�y(t��ng)�ęC(j��)��(g��u)�O(sh��)Ӌ
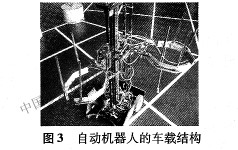
܇�d�C(j��)��(g��u)�Y(ji��)��(g��u)�D��D3��ʾ�������������ڣ���(d��ng)�C(j��)���˵��_(d��)ָ���ĵ��c(di��n)���ÏęC(j��)е�ְγ�������ģ�K(�����ҷ��C(j��)���ˎ����ɫ�z���^����������R�e������ģ�K)��Ȼ��ͨ�^�C(j��)е���D(zhu��n)�Q�C(j��)��(g��u)��ʹ�������еďęC(j��)е�ֺ����C(j��)е��ͬ�r��r��D(zhu��n)��90�����C(j��)����ǰ��ďęC(j��)е���D(zhu��n)���C(j��)������߅�����C(j��)е���D(zhu��n)���C(j��)������ǰ�����C(j��)���˲������C(j��)е�ְ��ż��������úõ�ģ�K��
���ڱ�ِ���C(j��)���˵Ŀ�������Ҫ��,����҂����O(sh��)Ӌ��,�ęC(j��)е�������^�p,�����σH���ڰ�ȡ�́G��������ģ�K�������C(j��)е�քt��(d��n)����Ҫ�΄�(w��)�����ڰ��\(y��n)�Ͱ����Լ���ģ�K�����ęC(j��)е���D(zhu��n)�Q�C(j��)��(g��u)�����F���X݆���ӣ����F���X݆���D(zhu��n)�Q�(q��)��늄әC(j��)��D4��ʾ��
�����ęC(j��)е�ֵIJ��ã�������ҷ��C(j��)���˵�Ч������ʹ���������҂����_(d��)��(zh��n)܇�����ź�ģ�K���ҷ�Ҳ��ͨ�^���ߌ�����ģ�K���Ķ��÷֡�
�C(j��)е�ֵ��������ֲ��Ì�ͬ�������ӣ�����߷�(w��n)���ԡ��C(j��)е�ֵ��_צ������צ�ϼ��b�����z�ͺ��ޣ�����߸��������C(j��)е�ֵ�������늙C(j��)���C(j��)е�ֵ��_צ��늙C(j��)�������ęC(j��)е�ֵ��D(zhu��n)�Q�C(j��)��(g��u)�е�늙C(j��)�������Î����i����24 Vֱ���p��늄әC(j��)�����ڳ�����ơ�
2�(q��)��ϵ�y(t��ng)늿��O(sh��)Ӌ
2��1Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ
�C(j��)����늿�ϵ�y(t��ng)��ԭ����D��D5��ʾ������(j��)��ِҪ�����ЙC(j��)���˿����������^50kg������Դ����24 V��늳ء�����҂�����1��5 AH���U����늳�������Դ���U����늳�(y��u)�c(di��n)���^������������(qi��ng)�����ã�ȱ�c(di��n)���w�e�������^�أ����]���҂��O(sh��)Ӌ�ęC(j��)�������������^�p(�C(j��)�������ɲ��ִ����X�Ͻ�Y(ji��)��(g��u)����܇�����H���10��2 kg)���m��(d��ng)?sh��)�����늳ص�����߀��ʹ܇�ױP���Ľ��ͣ����әC(j��)�������ߵķ�(w��n)���ԣ�����҂������˴���͵�늳ء� |