���������`���ֵĿ���ϵ�y(t��ng)�о�
��(zh��n)��(qi��ng)���R����Ѧ�(y��ng)
(�������պ����W(xu��)������100083)
ժҪ��BHG��l���`������һ�N����ȫ�(q��)��(d��ng)��ָ�����`���֣������ϵ�y(t��ng)��Ҫ����λPc�C(j��)����λǶ��ʽ�������M�ɣ�ͨ�^(gu��)RS232�M(j��n)���ͨӍ����������λPc�C(j��)���ƽ��棬��(sh��)�F(xi��n)���ƅ���(sh��)��ݔ�롢�{(di��o)��(ji��)�͂�������Ϣ�Č�(sh��)�r(sh��)����������TMS320LF2607A�O(sh��)Ӌ(j��)���`���ֵ�Ƕ��ʽ������������(du��)Ӳ���·�ĸ���(g��)ģ�K����Ԕ��(x��)�Ľ�B����(du��)�(q��)��(d��ng)�`���ֵ�ֱ���ŷ�늄�(d��ng)�C(j��)�M(j��n)���ٶȺ�λ�õ�PID���ƣ�������`���ֵ�ץȡ���ܡ�ԇ�(y��n)�C��ԓϵ�y(t��ng)�ܿɿ��\(y��n)�в��_(d��)���A(y��)�ڵ�Ŀ��(bi��o)��
�P(gu��n)�I�~���`���֣�DSP��ֱ���ŷ�늄�(d��ng)�C(j��)��PID
�ЈD���̖(h��o)��TM383��4 1 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004-7018(2008)04��0035��03
 0�� �� ��ָ�`��������һ�N�M�˻����܌�(sh��)�F(xi��n)�`������ęC(j��)����ĩ�˲������،��˙C(j��)���˵đ�(y��ng)���I(l��ng)�����������ɶ��^(gu��)����(d��o)�¿��Ʊ��^��(f��)�s���ɱ��^�ߣ�Ŀǰֻ�ܑ�(y��ng)���ڌ�(sh��)�(y��n)���A�Σ�δ����������a(ch��n)�еõ��V����(y��ng)�á�����O(sh��)Ӌ(j��)���ƺ�(ji��n)�Ρ�������ɷ�(w��n)��ץȡ���w�ȔM�˄�(d��ng)�����`���־�����Ҫ�ĬF(xi��n)��(sh��)���x�͑�(y��ng)�Ãr(ji��)ֵ��������ϵ�y(t��ng)���`���ֵ���Ҫ�M�ɲ��֣����`�������Ҫ���(d��ng)������Ҫ���C���`���ֵĿ���ϵ�y(t��ng)��Ҫ������֪ϵ�y(t��ng)����(sh��)��(j��)�ɼ�̎��ϵ�y(t��ng)���(q��)��(d��ng)ϵ�y(t��ng)���˙C(j��)�����Լ�����һЩ�b�á�
1���(du��)��
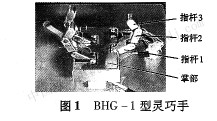
�����о���BHGһ1��ȫ�(q��)��(d��ng)�����ɶ��`����[1]������(g��)��ȫ��ͬ����ָ�M�ɣ���DI��ʾ������(g��)��ָ���Ʋ��ʽ��e(cu��)��(du��)�Q���ã�ÿ��(g��)��ָ������(g��)ָ�U��ָ�U֮�g�������C(j��)е��ϣ�ͨ�^(gu��)䓽z�M(j��n)�Ђ���(d��ng)���p���˽Y(ji��)��(g��u)�ď�(f��)�s�ԣ�����(g��)��ָ��һ��(g��)Ƕ�������е�ֱ���ŷ�늙C(j��)�M(j��n)���(q��)��(d��ng)������(sh��)�F(xi��n)�˸���(g��)��ָ��(li��n)��(d��ng)��ÿ��(g��)��ָ�ĵڶ��͵���ָ�U���b�ДU(ku��)ɢ���c(di��n)���|�����������ɼ�ָ�U������Ϣ��ԓ�`���֏ĽY(ji��)��(g��u)�c������ģ�������ֵ�Ĵָ��ʳָ����ָ���Ɍ�(sh��)�F(xi��n)��(du��)һ���ߴ緶����(n��i)���w�İ��j(lu��)ץ�֣��������ɶ��١��Y(ji��)��(g��u)��(ji��n)�Ρ�����ϵ�y(t��ng)����(du��)��(ji��n)�Ρ��ɱ��͵ȃ�(y��u)�c(di��n)��
2����ϵ�y(t��ng)�Ŀ��w�O(sh��)Ӌ(j��)
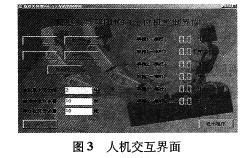
BHG-1���`����(du��)���w���j(lu��)��܉�E�M(j��n)�ЊA�֣��nj�(du��)�A�ַ�ʽ�ćLԇ�������ϵ�y(t��ng)��D2��ʾ����Ҫ������λPc�C(j��)����λǶ��ʽ�������� 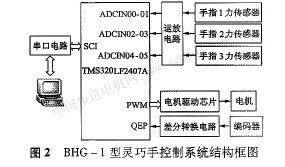 ��λ�C(j��)ͨ�^(gu��)���ڰl(f��)�͊A�o�����_���������(sh��)�O(sh��)��ֵ����λ�`���ֿ�����������(du��)���M(j��n)�Ќ�(sh��)�r(sh��)�O(ji��n)�أ���(sh��)�F(xi��n)�˙C(j��)��(du��)Ԓ����λ����������(j��)�����(q��)��(d��ng)��ָ��(d��ng)����
��λ����������늙C(j��)���ÿ��ƣ�DSPоƬTMS320LF407A����ģ���Ҫ��Ɍ�(du��)�������������M(j��n)�вɘӣ���(du��)늙C(j��)�M(j��n)���ŷ����ƣ��Լ�����λ�C(j��)�����N���ƅ�����TMS320LF2407A�e�m����늙C(j��)���ƣ����¼����������з֞�ʮ�ȃ�(y��u)�ȼ�(j��)��40��(g��)�Д࣬���еķǷ���ַ�L��(w��n)�Д����ڳ������w������r��(f��)λоƬ��PWM���i�Д��܉���늙C(j��)���Ʈ�������r�·��iPwMݔ�������C��ϵ�y(t��ng)������̎���Č�(sh��)�r(sh��)��[2]��DsPоƬ���ɵ��@Щ���ܴ��(ji��n)��������(g��)����ϵ�y(t��ng)���O(sh��)Ӌ(j��)��
2��1�˙C(j��)��������
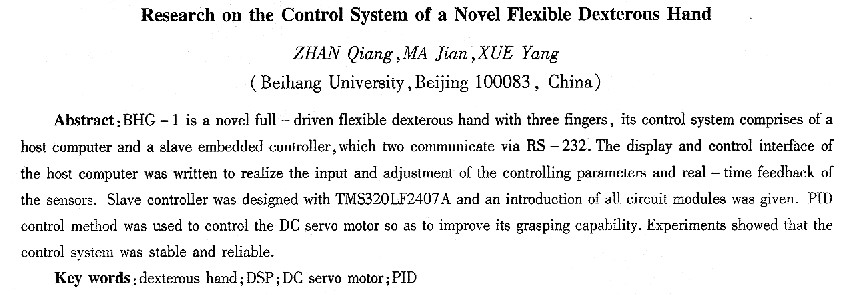
ͨ�^(gu��)��λPC�C(j��)�ϵ��˙C(j��)�������������ɸ��N���ƅ���(sh��)��ݔ����{(di��o)��(ji��)����(du��)������������Ϣ�M(j��n)�Ќ�(sh��)�r(sh��)�O(ji��n)�y(c��)����D3��ʾ���˽�����������֣������^(q��)������λ�C(j��)�l(f��)���������(sh��)�O(sh��)�Å^(q��)���O(sh��)����λ�C(j��)�Ŀ��ƅ���(sh��)���@ʾ�^(q��)���@ʾ��(l��i)����λ�C(j��)�Į�(d��ng)ǰ��Ϣ��ԓ��λ�C(j��)����Ľ������^��������(ji��n)�Σ���(zh��)��Ч�ʸߡ�
2.2��������ͨӍ�·
TMS320LF407A��(n��i)�����ɵĴ���ͨ�Žӿ�scIģ�K��һ��(g��)��(bi��o)��(zh��n)��ͨ�î������գ��l(f��)��(uART)ͨ�Žӿڣ���scITXD(�l(f��)��ݔ��)��scIRXD(����ݔ��)�ɂ�(g��)�ⲿ���_������̖(h��o)�ƽ��TTL�͡���Pc�C(j��)���ڵĮ�������ͨ�Ż��ڣ�RS232C��(bi��o)��(zh��n)�����ߵ���̖(h��o)߉�ƽ��һ�£�����x��MAX232оƬ�M(j��n)���ƽƥ�䡣ԓоƬ�ЃɌ�(du��)�գ��l(f��)��Ԫ����(sh��)�F(xi��n)DSP�cPC֮�g�Ĵ���ͨ��ֻ��һ��(du��)�գ��l(f��)��Ԫ���ɡ����ĵĴ����·���������ƽӷ�����D4��ʾ�����D������ͨӍ�Ӿ��D�ء����Ք�(sh��)��(j��)�Ͱl(f��)�͔�(sh��)��(j��)���_���B��
2��3늙C(j��)�(q��)��(d��ng)�·
늙C(j��)���(q��)��(d��ng)��PWM�}���{(di��o)����̖(h��o)��(l��i)��(sh��)�F(xi��n)��ͨ�^(gu��)�O(sh��)��DSP�Ķ��r(sh��)��Timerl��TlPER�Լ��cT1CMPR�a(ch��n)��PWM��̖(h��o)��Tl CMPR�cT1PER��ֵ����PWM���ε�ռ�ձȡ�PwM��̖(h��o)Ҫ�����ŷ�늙C(j��)���M(j��n)���}�_���䣬����(du��)늉����}��׃�Q����̖(h��o)�M(j��n)���m��(d��ng)?sh��)�߉׃�Q������o���O |