���oˢֱ��늄әCƫ�����ͬ������
���i���R��
(�������I��W���������710072)
ժҪ�������_�oˢֱ��늄әC����ƌ���������ƫ����ϵĶ�늙Cͬ�����Ʋ��ԡ���Simulink�����˶�늙Cͬ������ϵ�y������늙C�ŷ�ϵ�y�ڲ�ͬؓ�d�µ��D�١�ϵ�y�Ŀ��ɔ_���M���˷����о��������û���DSP��CPLD�Ķ�늙C����ϵ�y��C������ԡ�ϵ�y�^�õČ��F�˶�늙C�o���ٶ�ͬ����ۙ������ͬ���Ըߣ����ɔ_�������ȃ��c���C����ƫ����Ͽ��Ʋ��Ԍ����oˢֱ��늄әCϵ�yͬ�����Ƶ���Ч�ԡ�
�P�I�~��ͬ�����ƣ��oˢֱ��늄әC��ƫ����ϣ�DSP��CPLD
��Ȧ���̖��a3M133 �īI���R�a��A ���¾�̖��1004��7018(200s)04��0042��04
0����
�oˢֱ��늄әC�ǽY���˶��W�Ƽ��g��һ�N����늙C���C�һ�w���Y�������и��ٶȡ���Ч�ʡ��߄ӑB푑����ߟ������߿ɿ��Եȃ��c��ͬ�r߀���е������L���������c��Ŀǰ�oˢֱ��늄әC�яV�������ڸ����I���e���ں��պ����I��õ��V�����á����@Щ�I��đ����н�����Ҫ���_늙C���_��һ�¹������Ҍ�����ϵ�y�Ŀɿ��ԡ����ɔ_�������Ю���������Ҫ���҂�����ƫ����Ͽ��Ʋ��ԁ팍�F�oˢֱ��늄әC��ͬ�����ƣ��������˟oˢֱ��늄әC�Լ�һϵ�п��Ɯy��ģ�K�ķ���ģ�ͣ����o�����ڲ�ͬ�l���µķ���Y�������ʹ����DSP��CPLD������оƬ�Ŀ���ϵ�y����C��������ԡ�
1�oˢֱ��늄әC�Ĕ��Wģ��[1]
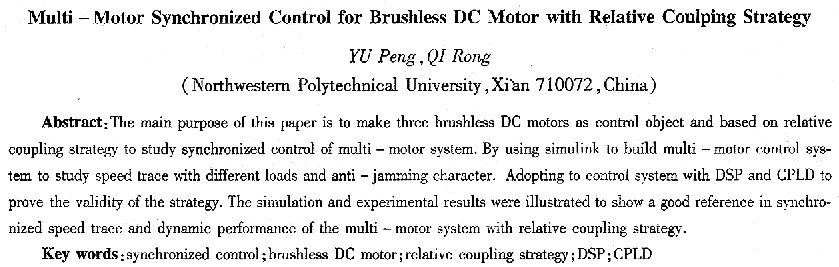
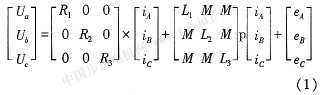
�oˢֱ��늄әC�������η�늄ӄݣ�����������Ρ��ڽ������Wģ��֮ǰ���ȼ��O늙C�����@�M���Q�������D�Ӵ��裬���ඨ���@�M�Ը�����Ҟ�L�������@�M�g���о���M���������yֱ��늄әC��늉�ƽ���h�̿ɵ�����늉��Ĕ��Wģ������:
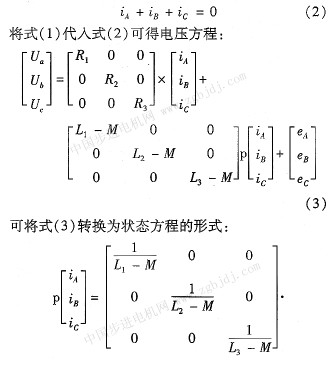
ʽ��:eA��eB��eC��늙C�ķ�늄ӄݣ�p�������ӡ��O늙C��Y���B�ӣ��ҟo���Ծ����t��֪��
���У��؞��D�ӵ�늽��ٶȣ�p��O������J���D�ӑT����Te��ؓ�d�D�أ�TL��ճ������ϵ����
2���Ʋ��Է���
��ǰ�����I�������Ҫ��ͬ�����Ʋ�����Ҫ�������п��ơ����Ŀ��ơ�������Ͽ����Լ�ƫ����Ͽ��Ƶȡ�
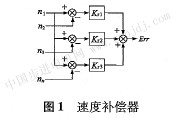
�īI[3]�C����ƫ����Ͽ��ƵĽY����Դ�ڽ�����Ͽ��ƣ�ֻ������A������һЩ���M�����ܱ����|��׃����ʹ���ܿ˷��������Ʋ��Ե�ȱ�c��ƫ����Ͽ�������Ҫ�ĸ��M�������ø���늙Cϵ�y֮�g������ϵ���Pϵ���ٶȷ�����̖�������˸���늙C�������ٶ���̖���ٶ��a�����ĽY����D1��ʾ���ٶ��a��ģ�K��������ͬ��̓�M�ء�һ�ӣ�������늙C���^�����ں��D�ؔ_�ӕr�������ٶȚw�㡣�D1��ʾϵ�y��������������ģ���ÿ�M늙C����
Ҫ�Ъ��Ե������͂����������ε��f��ֻ�nj�ƫ����Ͽ��Ʋ����\�õ������ٶȷ���ģ�K��ʹÿ�������ڛ]��������ݔ�����r���܉�ͨ�^���� 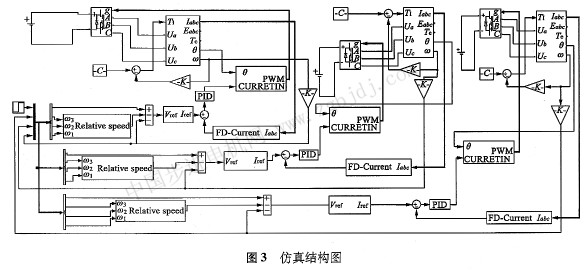 늙C�Ġ�B���ó�����ָ�
�D�У�Kr1��Kr2��......Km���ٶȷ�����ϷŴ�����n��늙C�Ĕ����������ٶ��a�����еķ��������������ͬ����������Ǟ����a������늙C�����D�ӑT���IJ�ͬ�����ڵġ������ٶ��a�����ķ����Ŵ�����K������ͨ�^�䌦����늙C�đT�Գ�����á�ͬ�r�������OӋƫ���ٶ��a�������Ҫ֪������늙C�đT�Գ�����Ħ��ϵ�����Լ�����ϵ�y����Ȼ�l�ʺ�����ϵ������ɂ����������������]�hϵ�y���Á��OӋH��������������Q������ϵ�y��˲�r�����Լ���ؓ�d׃���r�ķ�����B��
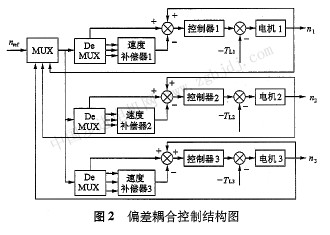
��ϵ�y�����ٶ��c������p�]�h���ƣ�����ƫ����ϲ��ԣ�ʹϵ�y���ͬ�����Ƶ�Ŀ�ˡ�ÿ�_늙C���Ќ��T�Ŀ��������ٶ��a��ģ�K����ÿһ�_늙C�������ģ�K�M��һ���]�hϵ�y��Ȼ���ϵ�y�gͨ�^�ٶ��a��ģ�K����������γ���������ϵ�y������ƽY����D2��ʾ��
|