���ڿɿ����Դ�ĸ߾��ȸ��ֲ��M늄әC������
�����x���u���£��Oƽ���R���У�������
(�K�ݴ�W�����K�K��215006)
ժҪ����B��һ�N���ڿɿ����Դ���F�߾��ȸ��ֲ��M늄әC�����ӵķ�����ԓ�������������Ӽ��g�Ļ��A֮�ϣ��þ��ܿɿ����Դ�M�м����ӣ����Ì�����С���˷���Y���M������������Ķ��a���˲��M늄әC��������ķǾ��ԣ�����ˆβ������\�еľ��ȡ����y�Y���C��ԓ���ַ������м��־��Ժá��o�e���`��D����С�ă��c���e�m����Ҫ��λ�ƵĿ���ϵ�y�С�
�P�I�~�����M늄әC���ɿ����Դ�������ӣ��Ǿ����a��
�ЈD���̖��TM383��6 �īI���R�a��A ���¾�̖��1004��7018(2008)05��0021��04
����
���M늄әC�Ǿ��ܿ���ϵ�y����Ҫ�Ĉ��в��������ˌ��F�߾��ȶ�λ��Сλ�ƣ������þ���늼��ֵIJ��M늄әC�Ӽ��g��Ŀǰʹ���^���늼������·�Дز��������c�}�_�����{���ӷ���[1-2]���mȻ�ز������Ӻ��}�_�����{���Ӿ��܌��F���M늄әC�ļ��֣�Ҳ�����^�ߵļ��֔��͟o�e���`������c�������ڄ���@�M�Ļ��Ў������`��会�ֵľ���̶ȼ��β��\�D�ľ�����Ȼ�Dz��M늄әC���ֵ�һ��ƿ�i�����Ľ�B�Ļ��ڿɿ����Դ�ĸ߾��ȸ��ֲ��M늄әC�����ӷ������������ӷ����Ļ��A֮�ϣ�����þ��ܿɿ����Դ�M�м����ӣ�ʹ�Ä�ž�Ȧ������������鷀����ֱ�����Ķ�����ˆβ������\�еľ��ȣ�ʹ�ü����\�нǶ��_���������\�нǶȵ�1��512���β������\���`��С�ڡ��ٷ�֮20��
1늼�����ԭ��
���M늄әC�ļ�������ͨ�^������@�M����Ŀ��ƣ�ʹ���M늄әC���ӵĺϳɴň��ɞ鰴���֣��������D�ľ���ň��������D���D�ӣ��Ķ����F���Mi늄әC�����ֺ�IJ�����D�ӡ��ԃ�����ʽ�p���@�M���M늄әC�����������B�������@�M�ĸБ�늉��飺 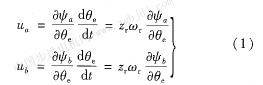 ʽ�У�zr���D���X������r���D�ӽ��ٶȣ���e���D�ӽǶȣ��D�������w�a���Ĵ�朦��c�D��λ�ý����P׃�����ڞ�һ�����X��2��늻��ȡ����ڻ��ʽ�������M늄әC�������C��������С�����Ժ��Բ�Ӌ���t��
��Ӌ�F��͵�Ӱ푣����ïB��ԭ����������ʽ���M늄әC����ͨ늕r늴Ź��ʞ飺
���ڃ��������@�Mͬ�rͨ�Բ�ͬ��С������r������a�����D��֮�͞����λ�Þ��µ�ƽ��λ�ã��@�Ӿ͌��F�˼��֡��ںϳ�ijһλ��ָ푞��e�r��Te=0���t�У�
�ɝM��ʽ(6)��߅��ȣ�����ʽ(5)�M��Te=0������������a�����D��֮�͞��㣬늙C���_�µ�ƽ��λ�á�ʽ(7)�У�im���@�M������~��ֵ����e=zr��,�Ȟ錍�H�D�^�IJ����(��e���ȶ�������ƽ��λ�Þ�����ԭ�c)����������Ҫ�õ����������ֵ[3]��
��ʽ(7)�ļ�������Փģ�Ϳ�֪��ֻҪ����늙C�����ɂ���ž�Ȧ��ͨ�^�����׃��Ҏ�ɣ�ʹ֮����ԓ���Wģ�ͣ��Ϳ����γ�һ�������ֲ������D�ľ���ň���Ȼ���@����Փ������ǰ���DŽ�ž�Ȧ���a���Ĵň������c���ӵĄ���������ɾ����Pϵ��Ȼ���������е��F���|���Զ���������ͬF�������M늄әC�Ą�Ų��ϣ��t���M늄әC��ž�Ȧ���a���Ĵň����Ⱦ��c���ӵĄ������ɷǾ����Pϵ��ʽ(6)��ʽ(7)�еĔ��Wģ�Ͳ����ܮa������ĈA�����D�ň�[4]�����Ҫ�����M�����������IJ��Ì�����С���˷���Y���M��������
2늼����ӿ����·
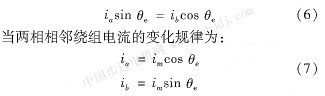
늼����ӿ��Ƙ�����D1��ʾ����Ҫ�֞鼚����̖�a���·�;��ܿɿ����Դ�ɲ��֡�
������̖�a���·����FPGAģ�K��D��A�D�Q�·���ƽ�{�����֡�FPGA����AI��RA��˾��cvcloneIϵ��EPlc6Q240оƬ��ϵ�y�r���50 MHz����Դ�����ṩ���OӋ����Ҫ����ԓоƬ�ăȲ� |