�oˢֱ��늄әC�Q���D���}�ӿ���
��ε1��ε�m1��������2�����t��2
(1�Ϻ����̼��g��W���Ϻ�201620��2�Ϻ������_�Ӽ��g����˾���Ϻ�200240)
ժҪ��ᘌ��������p��늄�݆�ğoˢֱ��늄әC�ĵ��D���}�ӵ�Ҫ�������һ�N�ͳɱ����߿ɿ����������F�ēQ���D���}�ӿ��Ʒ�����ԓ�������ղ�ͬ늙C�D�ٿ��ƓQ���^��PWMռ�ձȣ��M�������P����������_ͨ������ړQ���^���е�׃���ʣ����ַǓQ��������ړQ���^���л����㶨��ͨ�^�pС�oˢֱ��늄әC�Q������}�Ӂ�pС�������Q���D���}�ӡ���Փ�����͌����C��ԓ�����Ŀ����ԣ����яV���������p��늄�܇�v�I��
�P�I�~���oˢֱ��늄әC���Q�ࣻ�D���}�ӣ��p��늄�܇�v
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2008)05��0025��05
0����
�oˢֱ��늄әCͻ�����c��늙C���w���gС�������ܶȸߣ��^�d�����������Ʒ�ʽ���οɿ������p��늄�܇�v�еõ��ˏV���đ��ã���������е��D���}��ȱ�c�����������ڸ߾����ٶȡ�λ�ÿ���ϵ�y�еđ���[1]���oˢֱ��늄әC���D���}����Ҫ��Դ��늴��D���}�ӡ��X���D���}�Ӻʹ����D���}�ӵȎׂ����档���X���D���}�Ӻʹ����D���}�ӏ�늙C���w�OӋ���֣�ͨ�^��϶�ň������D�ӽY�����@�M��ʽ�ȵĺ����OӋ�����Եõ��ܺõ�����[2-4]���Q���D���}�������늴��D���}�ӵ���Ҫԭ��֮һ�����Q���^�����_ͨ����P�������׃���ʵIJ�ͬʹ�÷ǓQ����������F�}���nj��Q���D���}�ӵĸ���ԭ��[1,5]�������Q���D���}�������Ŀ��Ʋ������֣�ͨ�^�{������늙C�@�M�ϵ�늉�������폛�a늙C���w����׃���c�������Ե�ƫ��Ķ����ƓQ���D���}��[6-10]��늄�����܇��늄�Ħ��܇����늄��I܇���p��늄�܇�v݆ݞ(��݆߅���p����) �ßoˢֱ��늄әCҪ����е��D���}�ӣ��e����܇�v���Ӻ͵��ٹ��r��
����ᘌ�܇�ù��r���oˢֱ��늄әC�ĵ��D���}��Ҫ�����һ�N�ͳɱ����߿ɿ����������F�ğoˢֱ��늄әC�Q���D���}������������ԓ�����яV��������늄�܇�v�I��
1�oˢֱ��늄әC�·ģ���c���Wģ��
1��1��׃��һ�oˢֱ��늄әC�·ģ��
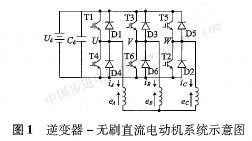
�������ƽ늉�����׃����늵���׃��һ�oˢֱ��늄әCϵ�y��D1��ʾ���D�У�Ud��ֱ���Դ��Cd�����gֱ����·֧��(�V��)��ݣ�T1��T6�鹦�ʹ��ʹܣ�Dl��D6���m�����O�ܡ���T1��T6�քe�ڸ��Ԍ�ͨ�r�g�ȸ�����ͬ���{�Ʒ�ʽ�M��PwM���ơ�
�����÷���������Ɵoˢֱ��늄әC�r,ͨ���x��1200�ɃɌ�ͨ���{�Ʒ�ʽ,�@�N�����܉���һ���D�ٺ���������Ⱥܺõر������ඨ������ķ�ֵ�㶨���Ķ��õ��^�鷀����늴��D��[1]��
1.2��׃��-�oˢֱ��늄әC���Wģ��
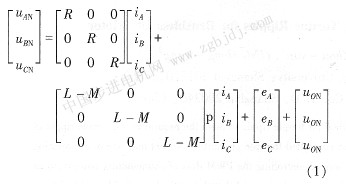
�oˢֱ��늄әC�������������ķ�������늄ӄݞ���������β����������¼��O��(1)��Ӌ��·͡��u���p�ĺʹŜ��p�ģ�(2)���Զ��������늘з�����(3)�����@�M���ßo�о�Y�νӷ������ඨ���@�M���ԸС����о��鳣�����������H�\����r������늙C�����@�M���cͨ����������늙C������늉�ͨ�������לy�����oˢֱ��늄әC�Ķ�늉���ʾ�飺
ʽ�У�uAN��uBN��uCN�քe��늙C���ඨ���@�M��늉�����늉����x��늙C�����ඨ���@�M��ݔ���A��B��c������ֱ��ĸ��ؓ��֮�g��늉��R�鶨���@�M��裻p�������ӣ�L�鶨���@�M��Ч�ԸУ�M�鶨���@�M��Ч���У�iA��iB��iC�����ඨ�����(��������ھ����)��eA��eB��eC�����ඨ���@�M��늄ӄݣ�uON��늙C�����@�M���c��ֱ��ĸ��ؓ��늉����uON����ʾ�飺
ʽ�У���r��Ԫˢֱ��늄әC늽��ٶȣ�P��O��������m��Cе���ٶȡ�
2�oˢֱ��늄әC�Q���D���}�ӷ���
2.1�Q������}�ӷ���
|