���ڸ��M�z���㷨�ğoˢֱ��늄әC�f�wģ���W�j����
�̾S��
(�����ЏV���ҕ��W�����K����213001)
ժҪ���oˢֱ��늄әC�Ą����W������һ�����A���Ǿ��ԡ�����ϵ�ϵ�y��ᘌ����yPI���ƵĜ����Ժ̈́ӑB푑������^������c�����һ�N���ڄӑB�f�wģ���W�jPI���Ƶğoˢֱ��늄әC�{��ϵ�y�ٶȿ������Č�ʩ���������ø��M�z���㷨(IGA)�����f�wģ���W�j���`�ٶȺ��������;W�j��ֵϵ���ȣ��Ķ����ϵ�y�ĄӑB푑����ܡ�����Y��������ԓ����푑��죬�����^���Ŀ��ɔ_�Ժ������ԣ��ӡ��o�B�پ����ڂ��yPI���ơ�
�P�I�~���oˢֱ��늄әC�����M�z���㷨���f�wģ���W�j��PI����
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004-7018(2008)05��0032��04
0����
���y�ğoˢֱ��늄әC(���º��QBLDCM)�{��ϵ�yͨ������PI���ƣ���PI���ƌ��|������һ�N���Կ��ƣ�����BLDCM�@�N���s�Ǿ��ԡ������r׃������ϵĿ��ƌ�����f��PI������ؓ�d���h��׃���£������Ч�����@׃��ӡ��o�B���ܡ����ƾ��ȼ������Ե��y�ԝM���������Mһ�����BLDCM�{��ϵ�y�Ŀ����ԡ������Ժ������ԣ����ܿ��Ʒ����ܵ����˂��ձ��Pע����A��Ŀǰ�ѳɞ�����I���һ���о����c[1]���˂��Lԇ���˹������cPl���ƽY��������������Pl���ơ�ģ��PI���ơ��W�jPI���Ƶȿ��Ʋ��ԣ�ȡ����һ����Ч��ģ�����ƾ����^���������ԣ�������������ϵ�y���B�`������ܱ��^����ƾ��Ȳ��ߣ��W�j�����^�������e�������ԌW�����ܣ������߂�̎�����_����Ϣ�Ĺ��ܣ��ҌW���^���^���^�����C�σ��ߵă��ݣ����Č��W�j��ģ�����Ƽ�PI���ƽY�����������һ�N���͵ĄӑB�f�wģ���W�jPI���Ʋ��ԣ�������BLDCM�{��ϵ�y�������ø��M�z���㷨(IGA)�ھ������f�wģ���W�j����������������Y��������ԓ�����Ŀ����Ժ���Ч�ԣ����ñ�������Ŀ��Ʒ�����ϵ�y푑��졢Ԫ���{�����ƾ��ȸߣ����кܺõ������ԡ������ԺͿ��ɔ_������
1 BLDCM���Wģ��[2,3]
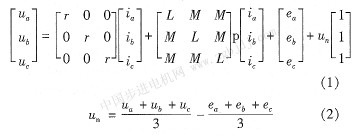
�ԃ�����ͨ������������B������ֱ������늙C��������׃������BLDcM�Ĕ��Wģ�͡����O��·��ͣ������]�u���ʹŜ��p�ģ������@�M��ȫ���Q���tԓ�����@�M��늉�ƽ�ⷽ�̿��Ա�ʾ�飺
ʽ�У�u a��u b��u c�鶨�����@�M늉���i a��i b��i c�鶨�����@�M�����r a��e b��e c�鶨�����@�M늄ӄݣ�L��ÿ���@�M���ԸУ�M��ÿ�����@�M�g�Ļ��У�un�������c늉���r�鶨���@�M��裻p�������ӣ�  �����������Q�������@�M늄әC��i a+i b+i c=O������M ia+M ib+M ic=O����ʽ(1)�����飺 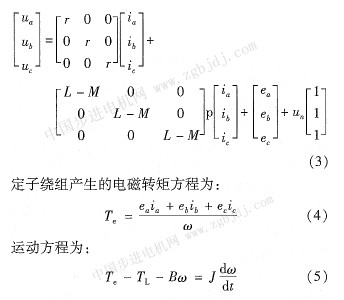 ʽ�У�Te��늴��D�أ�TL��ؓ�d�D�أ�B������ϵ�����؞�늙C�Cе�D�٣�J��늙C�D�ӑT����
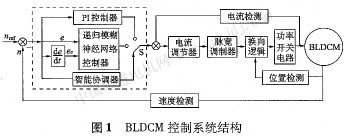
2 BLDcM����ϵ�y�Y��
�����OӋ��DLDCM����ϵ�y�Y����D1��ʾ��ϵ�y���Î����ٶȭh������h���p�]�h���ƣ�
����h���Â��y��Pl���ƣ������ܝM��ϵ�yҪ���ٶȭh�ɂ��y��PI�{������Q��һ�N�ӑB�f�wģ���W�jPI�������������ӑB�f�wģ���W�j��������PI�{�����ͺϘ����ٶ��{����������ϵ�y�ڲ�ͬ���\�Зl���£��Ԅ���PI���ƺ̈́ӑB�f�wģ���W�j������֮�g�ГQ��PI�������ą���������Ҏ�������OӋ����ϵ�y�o���l��ͻ׃�����F��B��Y���ɔ_��������׃������ʹϵ�y�l����ʎ���{�r��ܛ�_�Ps���Ԅ��ГQ���f�wģ���W�j
����������ϵ�y�l������ʎ���{����r��ԓ��������Ѹ�������ʴ_�Д࣬��ͨ�^�ٶȵ��{�����Ԝp��ϵ�y���{���ӿ�ϵ�y푑��������z�y��ϵ�y�l����ʎ(����| ei|�١�ei)���{(��e=o����de/dt��0)�r���_�Ps�Ԅӏij�ҎPI�����ГQ���f�wģ���W�j������������B���_�Ps���Ԅ��ГQ�x�������܅f�{���ھ��f�{�c���ƣ����ڲ�ͬ������֮�g���ГQ���a���������� |