����DSP�pģ���Ƶij���늄әC�Դ
���m��fʥ�t
(���Ͻ�ͨ��W���Ĵ��ɶ�610031)
ժҪ���ij���늄әC�����Դ��Ҫ����l�������һ�N����DSP��PID FUZZY�pģ���Ʒ��������o�����c֮�����ij���늄әC�Դ���OӋ˼·����Ԕ���·��ԇ������ԓ�������R�����������B���Ⱥã������^��đ��Ãrֵ���ƏV�rֵ��
�P�I�~������늄әC��DSP��PID��FUZZY���pģ����
�ЈD���̖��TM35 �īI���R�a��A ���¾�̖��1004��7018(2008)05��0043��03
0����
���ڳ���늄әC�S���ضȡ��Դ늉���ؓ�d�D�غͶ��D��֮�g�o���������l����׃��������մɵ��C���l�ʕ��l��Ư�ƣ�ϵ�y�ʬF�߶ȷǾ��ԡ�늙C������ă���ʽ�Y��������֮�g���ڙC늅������C����Ч���IJ�ƽ���Ե�ԭ��ʹ�ó���늄әC�γ�һ�����s�Ķ�׃��������ϵĕr׃ϵ�y����˲��܉��þ��_�Ĕ��Wģ����ȫ���_����늄әC�ӑB�ͷ��B���ԣ�������늄әC�Դ������Ʒ������о������һ�����y�ȡ����ڴˣ����ďij���늄әC�����Դ��Ҫ����l�������һ�N����DSP���pģ���Ʒ��������o�����c֮�����ij���늄әC�Դ���OӋ˼·��ԇ������ԓ�������R�����������B���Ⱥã����кܴ�đ��ú��ƏV�rֵ��
1����늄әC�����Դ��Ҫ��
����늄әC����Ҫ�������c�ǽo��ʩ�Ӄ�����λ����һ���ǶȵĽ���늉������É���մɵ��扺�Ч����ʹ����մɰl���C���Ӷ��ӭhһ����ӣ���ͨ�^�����D��֮�g��Ħ�������D�����D�Kֱ���\�ӡ���늼����£�����늄әC���ӱ����γ������в����v�����ڲ���̎���|�c�����\���ٶ�V������ʽ��ʾ[1]��
ʽ�У��ء���������ӵĽ��l�ʣ�
�ȡ�����·ݔ����̖����λ�
B��A�����քe���·ݔ����̖�������
k���������в��IJ������ɉ���մɵĘO���^��ķֲ���r�_����
����ʽ���Կ���������̎���ٶȿ��ƿ���ͨ�^�����B��A����λ��ȣ����l��f(f����/2��)�팍�F����˳���늄әC���ȱ���܉�ʴ_��Ѹ�ٵy���������C���l��(�C���c��ֹһ��)��������ཻ��늉�����λ����ཻ��늉��ķ�ֵ���M������ϵ�yҪ���M���D���{����
���ڳ���늄әC�ăɽMͨ�Ի���һ�����ƵĽ���늣��Ү�ԓ��λ���ijһ�Ƕȕrݔ���D���_��****ֵ�����в��̓ɂ�����ԴҪ������/2�������v���ͳ���늄әC����(�e�ǿvŤ�ͺ���)�����ڿvŤ�����ڊA�Ķ����е�λ�ò�ͬ���vŤ��ӂ����ٶȲ�ͬ�����yͨ�^Ӌ��õ��vŤ��������̖��λ���Ա��C���ӱ����|�c�vŤ����������λ�ֻ��ͨ�^�yԇ�����õ������Գ����Դ�ă�·ݔ������̖���܉���0��180���������B�m���{��
���ڳ���늄әC�����C���B�¹����ģ���ͬ�ij���늄әC�����C���l�ʲ�ͬ����ʹ��ͬһ����늄әC���C���cҲ��ֹһ������һ���棬�S���ضȵ�׃�������C���l�ʱ���Ҳ������׃����һ�㳬��늄әC���C���l����20��100 kHz֮�g���ʳ���늄әC�Դ���l��ݔ��Ҫ��20��100kHz���҃����B�m���{��
���⣬�Ķ��D�ӽ��|��ĽǶȷ�������·��늉���횿��{����
�v������������늄әC�����Դ��Ҫ�����£�
(1)��·����̖��λO��180���B�m���{��
(2)��·����̖�ɷ����{�����Ը�׃�D��
(3)�l��ݔ��20��100 kHz�ȿ��{��
(4)���ӌ�����늄әC������ؓ�d����Ҫ���F�迹ƥ�䣻
(5)�����l�ʡ���λ�ԄӸ�ۙ���ܣ�
(6)��·��늉����{��
2����DsP�pģ���Ƶij���늄әC�Դ
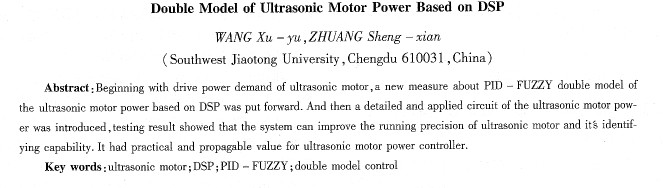
2.1ϵ�y��D
ϵ�y�M�ɻ�����D��D1��ʾ��
�z�y�h�������ٶșz�y��늉�������z�y���档�ٶșz�y���ù�늾��a�������IJ����L����һ��W�x���S���a��LFA-500A-18000С���}�_��늾��a�����������w |