һ�N�Π�ӛ���Ͻ�z�ӵķ��\ˮƽ�����M��
���P���������������^�s���
(�����I���I��W�������������I150001)
ժҪ����������F��һ�NsMA�z�ӵķ��\ˮƽ�����M����ͨ�^�������������Y���Ͳ���Ҏ�ɣ������˷��R�\ˮƽ�����M���IJ��әC��ԭ��ģ�ͣ��������������Ԫ��Ȼ���OӋ���Π�ӛ���Ͻ�z�ӵġ�������������Ԫ�ğo����b�ط��\ˮƽ�����M���������p��10����Ԫ�ķ��\ˮƽ�X���M���M�����΄�ԇԇ����ԓ���M�����Ԍ��Fǰ�M�����ˡ������D���ܣ����Ԍ��F8 mm��s���΄��ٶȺ�12����s���D���ٶȣ������Пo�����o��Ⱦ����늉��͡��C���Ժá��Y�����������ܷ�ȃ��c�����ƽ���w�Y���܉��M��Mխ���s��ˮ�
^���M��̽�y��
�P�I�~�����\�����Π�ӛ���Ͻ�z����������Ԫ�����\ˮƽ�����M��
�ЈD���̖��TM38 �īI���R�a��A ���¾�̖��1004��7018(2008)05��0057��03
O�� ��
�Ј�����������P���g�İlչ�����˙C���˼��g�İlչ���ں����_�l�����P�I�����\�ÙC���˼��g�������˸��������ҕ�����y���������M��������Դ�����ʵͣ��Y���ߴ���������h���_�Ӵ����ɿ��Բ���ӡ��������ܲ��Լ��\���`�����ܲ��ȱ�c����������S�������W�о��IJ����M�������й����ߵ�Ŀ�⼯�е��L��������ˮ�£��e������ˮ���������ε��~��΄әC�����о��ϡ��~�������Ȼ���������������N��࣬����h�����������˔zȡʳ��ӱܔ�������ֳ����ͼ�Ⱥ��ε�������Ҫ���~��^�|�f�����Ȼ�x���M�����˷Ƿ���ˮ���\���������ȿ����ڳ־������±��ֵ��ܺġ���Ч�ʣ�Ҳ�������������ٻl�������F�ߙC����[1]�������~��΄әC���ƄәC������ˮ�¸��ε��뷨�����S�������W�����ϿƌW���Ԅӿ�����Փ�ȌW�Ƶİlչ�ɞ�F�����ں������кܶ�������΄��ٶȿ죬�����\���`��@�����������������ص��΄ӷ�ʽ��������\���������M���ć����Ч�ʵ������ӏͺ����M��ʽ�팍�F�΄ӣ����ڸ����΄ӕr��Ҫ����ˮ���M���ڵ����΄ӕr��Ҫ�����w�ɂȵ����������M�����Ԍ��F�`���ǰ�M�ͺ��ˡ��@�N���M��ʽ���о�ķ����rֵ��
1���\���΄әC��
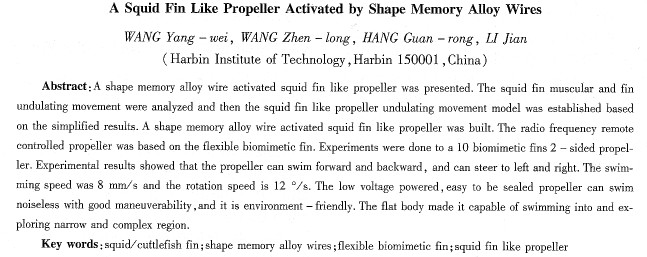
���\�����^��V����,�ǟo��ܛ�w������\����D1��ʾ����Ӣ�����ЃɷN�з���һ�N��Squid,��һ�N��Cuttlefish���ĈD�Ͽ��Կ���������������������ͬ��Squidβ�������^С����Ҫ���Á�
�������wƽ��ģ���cuttIefish�������@������Ĥ�ϣ����˱������w��ƽ���⣬߀���������䲨���ε��\���Ƅ�����ǰ�M�����˺��D���ȣ�����ˮ���M�ȹ��ܲ�e����[2]��
���\��Ҫ����ˮ���M��ʽ���F�����΄ӣ�����****���_ÿС�r150 km�����\�������Q�ֲ������w�ăɂȣ��܉��й���IJ��ӣ������΄Ӻ͑Ҹ����mȻ����Ĥ�տs��ˮ���M�ṩ���\�ӵ���Ҫ�������������ڵ����΄ӡ����ַ����͑Ҹ��r������Ҫ���á����\���������M������~��е�����ģʽ(Rajiform)[3]�������ڞ��\�������Եģ��]�й���֧�Σ������\�ӷ��ȿ��Ը����`����Ҳ��������ͬ���\�����ӕr���ϙM��������ͬ��
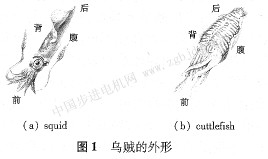
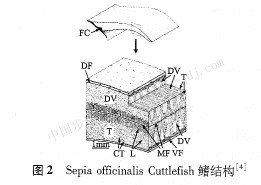
���\���ļ���Y����D2��ʾ���D�У�cT��ʾ����б�Y���M���w�S��DF��ʾ���ȽY���M����Ĥ��DV��ʾ��������Fc��ʾ��ܛ�ǣ�L��ʾ�v�⣬MF��ʾ����Y���M����Ĥ��T��ʾ�M����vF��ʾ�����Y���M����Ĥ���΄ӕr�M������Ҏ���տsʹ���ֲ����ϻ����������������γɲ��ӣ�ͬ�r�������տsʹ��׃�������\���еęM��ͨ�^Ҏ���տs��ÿ������Ԫ�ڲ�ͬ����λ�M�ϳ������ӵIJ��Ρ�
2���\ˮƽ�����M����ԭ��
���\ˮƽ�����M����ͨ�^ģ���\���������Y�����\�ӷ�ʽ���������ͽY���OӋ�Ϳ��Ʒ����a���c����Ƶ����M�����Ķ�ʹ���M�������@�N�����ӷ������M���������Fǰ�M�����ˡ��Ƅӡ��D���ܡ����\ˮƽ�����M�������ɲ��֣����M���IJ��әC�������M���Ŀ���ϵ�y��
���M���IJ��әC���������\���ĽY���M�к��������\�ӷ�ʽ���Ժ�������������Ԫ����һ���ĕr���Pϵ�@���Ե�����Ԫ���c(����Ԫ�c�C�w���B���c)���������ӏ��Ա�Ĥ�γɲ�������������Ԫģ���\�ęM�����Ï��Ա�Ĥ���B����������Ԫ�γɲ� |