��݆������늄�܇�Ŀ������OӋ
�� �£����x���ﺣ�������ڵ£������
(�������I��W���������710072)
ժҪ���OӋ�˻���Plc��cPLD����݆������늄�܇������������������Ӳ���·�M���M����Ԕ�����U������늄�܇���]�h�{�ٿ��Ʋ����M���˷�����늄�܇���ٵ����P�����C��늄�܇�������OӋ�������܉F����݆������늄�܇�M�����õ��ӿ��ơ�
�P�I�~��늄�܇��݆ݞ늣��C��������
0�� ��
���S��������صĴ����Ⱦ����ԴΣ�C�����y��ͨ����һ��܇�Ŀɳ��m�lչ���RԽ��Խ�������΄ݡ�늄�܇(���º��QEV)�ǽ�Q�������}����Ч;�����õ���Խ��Խ�V�����о��c�lչ��Ŀǰ��늄�܇�Ǻ��݆��ǰ��݆�ӷ�ʽ�������������fЧ�ʺ�܇�w���g���Ƶȿ��]�������oˢֱ��݆ݞ늙C��݆������ʽ늄�܇�ѽ��ɞ��о����c��݆ݞ��늙C****��׃����܇���y���ӷ�ʽ��늄әC���b��܇݆��݆ݞ�ȣ�늙C���D�Ӟ����D�ӣ�ݔ���D��ֱ�ӂ�ݔ��܇݆���ᗉ�˂��y���x�������p���������Ә������șCе��������܇�����p�p�������˙Cе���ӓp�ģ��������`���������ԡ�
��������݆������늄�܇��ƽ�_�������_݆ݞ늙C�������b�ã��OӋ��늄�܇������������Ҫ�΄��Džf�{�������_늙C���D�٣�ʹ늄�܇�߂�ABs����Ӳ��ٵȹ��ܣ����܇�v���������ʡ��_����܇��ȫ�ɿ���
l������Ӳ���OӋ
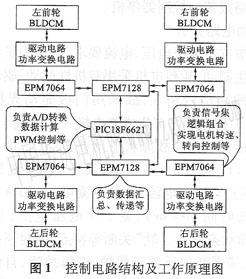
���ˌ��F���_�oˢֱ��݆ݞ늙C�ąf�{���ƣ������OӋ�˻��چ�Ƭ�C(PIc)�͏��s�ɾ���߉����(cPLD)����ͨ��늄�܇������������Ҫ�����������·�����·����׃�Q�·��
l 1�����·�M��
�����·�ĺ�����PIcl8F6621���ɿ�cPLD��ͬ�M�ɣ��ɿ�cPLD�քe��EPM7064sLc44-lO(���º��Q��EPM7064)��EPM7128sTcl00(���º��Q��EPM7128)���ĈD1����������PIc�c�ɿ�CPLD�����Pϵ.
l 2�����·�����^��
ϵ�y��늺��{���ͨ�^����P������̤�塢�Ƅ�̤���ṩ���ӡ��Ӝp�١��D���Ƅӡ�ͣ܇���ⲿģ�Mָ�ָ��^λ�Ƃ������D�Q��ģ�M���̖ݔ�뵽PIcl8F662l�����^A��D�D�Q�������a��������PwM��̖��PwMͨ�^EPM7128�ͽoEPM7064��EPM7064�����D��λ����̖��ͨ�^߉�M��Ӌ���ÿ�_늙C�������ٸ���PwM��̖��늙C�M���D�١��D��Ŀ��ơ�ͬ�rEPM7064��늙C�D�ٵ���Ϣ�ͻ�EPM7128��18F6621�xȡEPM7128��늙C���r�D�ٲ��c�ⲿָ������^���M���ٶ��]�h���ƣ���K�_������늄�܇�\�е�Ŀ�ġ�
l 3�^�����o�·
���˷�ֹ݆ݞ늙C�@�M����^�d����ɓp�ģ������·���OӋ���^�����o�·��
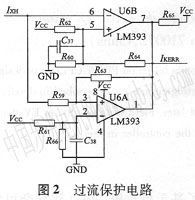
��������������Լ��p���^��LM393�M�����^�����o�·����D2��ʾ��
��������������z�y���������O��100A��ݔ��늉�0��5 V�����^�V��������������·���D2��LM393�Ĺ��_6��Iݔ��ֵ��O��5 V���ɈD��֪����I��ݔ����0��5��4. 5 V�r(��ͨ�^��׃R��R61��R62��R66����ֵ����׃ԓ���o��)���^����̖Iݔ�����ƽ������IxH����0��5 V�����4��5 V�r��Iݔ�����ƽ�����o�·�Ĺ����^���ǣ����^���l���r�����^��LM393ݔ��I�l���ƽ��׃һ�����·��һ������ͣ�C��
1��4���·����
���]����늙C늉������Ҫ��ͬ�r���ˌ��F늄�܇�����Ƅӣ�݆ݞ늙C�����p�O���ӣ���оƬ��Ҫ�Ѓ�·��̖ݔ�룬�ʲ����T�O�ӹ������HcPLһ316J����Ȳ����ɼ�늘Oһ�l��OV늉�Ƿ͙z�y�·�����Ϡ�B�����·�������м���cMOs��_TTL�ƽ������x���߉�(****늉����_1 200 V)�����^�����(��������_150 A)���췴��(���L�r�g500 ns)��������늉�����(15��30v)�����Ϡ�B��������ܛ���P������c��ͬ�r߀�ṩ�^�����o�������hǷ���i�����o��߉���ϡ��Ի֏͵ȱ��o���ܣ������·�Ŀɿ������ṩ�˱��ϣ�ͬ�r߀���к������F�����c��
���OӋ��������6ƬHcPL-316J��ÿһƬ��һ��M0sFET�����·�B�ӈD��D3��ʾ��ZCA��FGA����EPM��7064�l��������PwM�ͷ���PwM��̖�����^�����ɹ��_11ݔ����MOsFET�T�O�����Ӳ��_jAl�Ĺ��_3��JAl�Ĺ��_l�B��MOs��FET��©�O�����_4�B��M0sFET��Դ�O��REsET��ϵ�y��λ��̖��FAuLT��HcPLһ316J��늉��z�y������̖�����z�y��MOsFET��©һԴ�O늉�V�����~��ֵ�� |