�x�Ӿۺ���-���ُͺ���l(f��)չ�C��
����������ܣ����A�壬�w����
(�Ͼ����պ����W�����K�Ͼ�210016)
ժҪ����B��һ�N�������ܲ��ϡ����x�Ӿۺ�����ُͺ�������������Ժ��әC�����������x�Ӿۺ���-���ُͺ���������������һЩ���Ì��������չ�����x�Ӿۺ���һ���ُͺ�����δ���İl(f��)չǰ����
0 �� ��
�x�Ӿۺ���һ���ُͺ���(10nic Polymer-MetaI composite�����QIPMc)���˹������һ�N�������x����EAP(electroactive polymer)������Ҳ�Q���x�����˹����⡣���ڷ����Cе����һ���������(q��)�����c����������һ�N����b�á�IPMc���ΑB(t��i)�����һ�K������Ƭ��ԭ�Ͽ�����DuPont��˾��NafionTMĤ��Ҳ�������ձ���FlemionĤ��selemionĤ��Ȼ����Ĥ�ăɂ������늘O(���KPt����Au���F����)�ɵ�IPMcĤ����늘O�ϼ��ϵ�늉�(1��7v)����ʹ���a(ch��n)��һ���ď���׃�Σ��Ķ����������������������늉���ֻ�Ӽ��Cе�d��(����)����ʹĤ���±���a(ch��n)���λ��t�������Ԃ�������IPMc���˂�������м������ܵ��������͂������ṩ�˿��ܣ����(q��)��늉��͡���ȸߡ�푑�Ѹ�١�λ�ƴa(ch��n)�����������������ĺÎױ��������\��IPMc�������������dz������ͻ��������ڷ����W�İl(f��)չ��Ŀǰ�m�����t(y��)����е(���������K��������������Ƥ�w)��̫��̽�����͙C���ˡ�MEMs�͊ʘ����T���I��
IPMc�İl(f��)չ�����ݵ�1939�꣬�˂��l(f��)������Ĥ�ı�����ٳ���һ���z�B(t��i)���y�ķ��������^���@�N�����γɵ�IPMc���r�����ڽ��ٌӺ;ۺ���֮�g����Ó�x�����Խ��ٌӲ��܌��F(xi��n)����늘O�Ĺ��ܡ��S�����g�l(f��)չ��20���o70�������Levine��Prevost�����\������߀ԭ�����M���僣���Q���@���y�}��1992��Oguro��shahinpoor��sadeghipourͬ�r�l(f��)�F(xi��n)��IPMc����(q��)�����ԡ�1999�����_��һ���P��EAP�ć��H���h�Լ��_չ��EAP�(q��)�ӵęCе���c�����M��������ِ�����������ձ����n���ڃ�(n��i)�Ķ��������о��C������I(y��)����IPMc�M����ȫ���о���2000���Ժ��@헼��g�õ����L��l(f��)չ�������S����N���ӵ�������������������������������8�_�������������������ȡ�
1 IPMc���әC��������
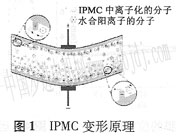
l 1 IPMC���әC��
IPMc���әC����Dl��ʾ���ڃ�늘O��ʩ��늉������б���ƽ���ֲ�����x�������늈�����������ꎘO�ۼ���ͬ�rĤ��(n��i)��x��(Na��Li)���Hˮ�Ժ��������Ƅӕr������ˮ����һ���Ƅӵ���ꎘO�������Ķ���Ĥ��һ���γ�һ���ܱ�(С��10��m)��߅��ӣ�IPMcĤؓ�O����Û���a(ch��n)��������ܶȴ�ĵط����ܶ�С�ĵط���������Ĥ��ꖘO�������Ķ�������׃��
���ֱͨ��늣�������Ĥ����u�֏�ԭ��(��ͬ�x�ӵĻ֏ͷ���ͳ̶ȶ��в�ͬ��)�����ͨһ���l�ʵĽ���늣���Ĥ���a(ch��n)���[�ӡ�
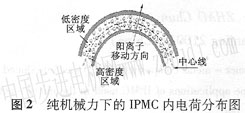
��֮��Ĥ��������׃�Σ�����늘O�g�a(ch��n)��늄ݲ�@�����Ĥ��׃��ʹĤ��(n��i)�ⲿ���w�S��Û����(n��i)���ĉ��s(��D2��ʾ)���@�͌���Ĥ���w�S��(n��i)�a(ch��n)�������ݶȡ������Ĥ��(n��i)����x�ӹ̶��ھۺ����(n��i)���w�S�в��������Ƅӣ�����x���ǿ����Ƅӵģ�����Ĥ��(n��i)����x�ӳ��ܶ�С�ą^(q��)���\�ӣ�ʹ늘O�g�a(ch��n)��늄ݲIPMc���@�N����������������sadeghipour��������ģ����shahinp00r�M����������о�����ȡ����һ���ijɹ����@�N����ʹ��IPMc��MEMs��������İl(f��)չ?ji��)����?/DIV>
늉��Ĵ�Сֱ��Ӱ��Ĥ����׃�����(q��)�����Ĵ�С����늉��^�͕r������Ĥ��(n��i)�����ͱ����迹�Ĵ��ڣ�TPMc���\�ӷ��Ⱥ�С����늉����ߕr��Ĥ��(n��i)�x���w�Ƶ��ٶȺ��w�������ӣ���Ĥ����׃������ͬ�r����Ĥ��(n��i)�x�ӷֲ��γɵ�늈��c���늉��γɵ�늈��_��ƽ��r����Ĥ����׃****�����⣬IPMcĤ����׃��߀�c���늉����l�����P������IPMcĤ��(n��i)ˮ����x���w���ٶȵ����ƣ��w����Ҫһ���ĕr�g�����IPMcĤ�ڵ��l늈������²��ܮa(ch��n)���^���λ�ơ�
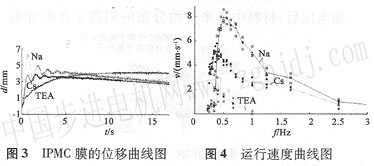
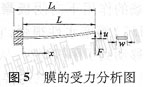
Ĥ��(n��i)��x�ӷN�Ĥ��λ����Ӱ�Ҳ�ܴ�����x�Ӳ�ͬ��Ĥ�ă�(n��i)���Ĥ��Ӳ��Ҳ��ͬ���@Щ���ض�������Ĥ�����Բ�ͬ������Masaki Yamakita�������������ò�ͬ���x��(Na��cs��TEA)�M��λ�ƺ��ٶȵČ��ȣ���D3���D4��ʾ��
������Ӱ������⣬߀��һ����Ҫ���ؾ���Ĥ�ĺ�ȡ���D5��ʾ���Oһ�KIPMcĤ�L��L1���� |