�Ԅ�ۙĿ��(bi��o)����Ͷ���x����ϵ�y(t��ng)�O(sh��)Ӌ
���w���������x
(�����Ƽ���W(xu��)��������ɳ410073)
ժҪ���鼤��Ͷ���x�O(sh��)Ӌ��һ����ϵ�y(t��ng)��ʹ��Ͷ���x�܉��Ԅ�ۙĿ��(bi��o)����������������PIcϵ�І�Ƭ�C�����ܟo����b����̖������Ͷ���x���\�ӣ�����ֱ��늄әC�Ͳ��M늄әC����(q��)�ӣ��Ķ��ܜ�(zh��n)�_��λ��Ͷ��ļ��⾀��
O�� ��
Ŀǰ�Ј�������һ�N����Ͷ���x(Ҳ�Q�����(bi��o)���x)���@�N�x���ܴ���(n��i)�l(f��)��ˮƽ����ֱ���⾀���V����(y��ng)�����컨��ʩ����ˮ늡����{(di��o)��������·���O(sh��)�ȸ����Ҫ��ֱ����ˮƽ�������P(gu��n)���̡�����Ͷ���x�mȻ�܉��Ԅ��{(di��o)��ˮƽ��������ֻ�ܿ��քӁ�Ͷ�䴹ֱ���⾀�������ձ������տ�A(ch��)L-KYRT��AL-K Yll����Ͷ���x�ȵȡ��S��ԓ�a(ch��n)Ʒ�đ�(y��ng)��Խ��Խ�V���������⾀Ͷ�侫��Ҫ��Խ��Խ�ߣ�����ʩ���IJ��㣬�ք�Խ��Խ���ܝM���˂��������҂��O(sh��)Ӌ���_�l(f��)�˻���PIc��Ƭ�C���Ԅ�ۙĿ��(bi��o)����Ͷ���x�Ŀ���ϵ�y(t��ng)���Ԅ�ۙĿ��(bi��o)����������ʩ���������˼���Ͷ��ľ��ȣ�����˹���Ч�ʣ������ڼ���Ͷ���x�ďV��ʹ�á�
1����ϵ�y(t��ng)���w�O(sh��)Ӌ
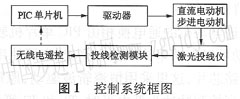
�Ԅ�ۙĿ��(bi��o)����Ͷ���x����ϵ�y(t��ng)��Ҫ��������ģ�K���o����b��ģ�K��늙C�(q��)��ģ�K�ȽM�ɣ�����ϵ�y(t��ng)���ƿ�D��D1��ʾ��
ԓϵ�y(t��ng)��Ҫ�Á팍�F(xi��n)����Ͷ���x���Ԅ�ۙ�;��_��λ��Ҫ���ܿ���늙C�������D(zhu��n)�����Ү�(d��ng)�_(d��)��Ŀ��(bi��o)λ�Õr�ܼ��rͣ�C��늙C����ֱ��늄әC�����ಽ�M늄әC����(q��)�ӣ���Ŀ��(bi��o)λ�þ�(Ͷ���xͶ���Ǽ��⾀)�܇����м���z�yģ�K���܉�z�y�����Ⲣ�D(zhu��n)�������̖�����g����һĿ��(bi��o)�����o�z�y���o�z�y��̖�l(f��)������ʾ���_(d��)��Ŀ��(bi��o)λ�ã��z�y�b�÷քe����ֱ��늄әC�Ͳ��M늄әC�\�м���늙C�������D(zhu��n)����(d��ng)���⾀����(zh��n)Ŀ��(bi��o)���r��ͣ�C��Ҳ���Ǚz�y��̖���е��o�ĕr�̾��Ԅ�ͣ�C���z�y����ͣ�C��̖�������D(zhu��n)��̖���ßo���l(f��)��o��Ƭ�C��
�Ԅ�ۙ����(zh��n)�_��λ�����^�̣�ֱ��늄әC���Ӽ���Ͷ���x�D(zhu��n)�ӣ�ͬ�r�l(f��)�����⾀����(d��ng)�z�y�b�Ùz�y��������̖�r���ijɲ��M늄әC�\�У����̖ͨ�^�o����b��ϵ�y(t��ng)���o��Ƭ�C��ԓ��̖����늙C�����D(zhu��n)��Ϣ����(d��ng)�z�y��̖���е��o�r����Ƭ�C���ܵ�ͣ�C��̖�������Ʋ��M늄әCֹͣ�\�У�ͣ�C�r�̼��z�y��̖���е��o�ĕr�̡������Ѹ�ٙz�y��Ŀ��(bi��o)�c�����r�l(f��)��o��Ƭ�C�����ϲ��M늄әC�Ŀɿ�ͣ�C���܌��F(xi��n)��(zh��n)�_��λ��
(1)������ģ�K�O(sh��)Ӌ
�����������Æ�Ƭ�CPIcl6F877A��PIcl6F87A����40���_������^(q��)��ģ�K�����˿�A��B��c��D��E�傀ݔ��ݔ���˿�ģ�K���������r��ģ�K��EEPROM��(sh��)��(j��)�惦��ģ�K��A��D�D(zhu��n)�Qģ�K�����в���ͨ��ģ�K�ȵȣ���15������O(sh��)��ģ�K��Ƭ��(n��i)�����˔�(sh��)���^�������O(sh��)��ģ�K�����˅f(xi��)�{(di��o)��ģ�K��Ч�\�У�PIcͬ�r�����S�����Д�ܣ��_(d��)1 8�N֮�ࡣ
�z�y��̖�Ɇ�Ƭ�Cͨ�^ܛ����̎����RB4��RB7�@�ėl���_�����ƽ׃���Д�Ĺ��ܣ������@Щ���_�B�ӟo��������������ֱ��늄әC�����M늄әC�����ӡ������D(zhu��n)��ͣ�C����(d��ng)������ƽ�r�a(ch��n)������ֱ��늄әC����Ͷ���x�\�D(zhu��n)���ɵ��ƽ׃���ƽ�a(ch��n)���Д��r���t���M늄әC�\�D(zhu��n)���ɸ��ƽ׃���ƽ�a(ch��n)��׃���Д��r���tֹͣ�\�D(zhu��n)��������(zh��n)Ŀ��(bi��o)���(zh��n)�_ͣ�C������Rc�ڿ���ֱ��늄әC�����D(zhu��n)��
(2)늙C�(q��)��ģ�K
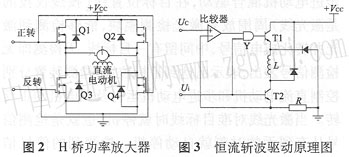
늙C�(q��)��ģ�K����ֱ��늄әC�(q��)��ģ�K�Ͳ��M늄әC�(q��)��ģ�K��ֱ��늄әC�(q��)����ֻ��Ҫһ��H���ʷŴ�����ԭ��D��D2��ʾ��H���ʘ����Ă�MOsFET��(g��u)�ɣ�ֱ��늄әC���D(zhu��n)�rQ1��Q4��(d��o)ͨ�����D(zhu��n)�rQ2��Q3��(d��o)ͨ������MOsFET�Ŀ��ٌ�(d��o)ͨ�Լ����m(x��)�����O�ܵĿ����m(x��)�������Ԍ��F(xi��n)��ֱ��늄әC�Ŀ��ơ������Ҫ�{(di��o)�ٿ���ͨ�^��Ƭ�C�a(ch��n)����PwM��̖�����ơ�
���M늄әC��ͨ늓Q����PIc��Ƭ�Cܛ���팍�F(xi��n)���(q��)�ӿ����ɹ��ʷŴ�������ɣ�Ҳ��ʹ�Ì��T�ļ����·оƬ���@����ú����ز��(q��)�ӣ�ԭ����D3��ʾ��
��(d��ng)�����}�_����ƽ�r��n��T2�ܶ�����(d��o)ͨ����(d��ng)�����}�_U1����ƽ�r��T1��T2���_ʼ�r����(d��o)ͨ���Դ���@�M��늣������@�M늸е����ã�R�ϵ�늉���u���ߣ���(d��ng)���^�o��늉�Uֵ�r�����^��ݔ�����ƽ����(d��o)���c�TҲݔ�����ƽ��T1��ֹ���Դ�Дࣻȡ�����R�ϵ�늉�С�ڽo��늉��r�����^��ݔ�����ƽ���Դ���_ʼ���@�M��늣�����(f��)ѭ�h(hu��n)��ֱ�������}�_׃?y��u)�ͣ���˿����}�_����ƽ���g���@�M�ɶ˵�����������ڽo��ֵ�܇�������T2ÿ��(d��o)ͨһ�Σ�Tl��(d��o)ͨ��Σ����TlҪʹ�ø��l�_�P(gu��n)�ܡ�U���@�����O(sh��)���������M늄әC�@�M��� |