�oˢ�p��늙C�\�����Ե��о�
����1,2�����P��1
(1��ꖹ��I��W���|�����110023��2�|���Ƽ��WԺ���|����Ϫ117022)
ժҪ��ӑՓ��Ԫˢ�p��늙C�ڿ��d�����d��ؓ�dͻ׃�N��B�µĮ����\�����ԣ������Mһ���о�Ԫˢ�p��늙C���Ʋ��Ե춨����Փ�ͷ�����A��
�P�I�~��Ԫˢ�p��늄әC���\�����ԣ��������
�ЈD���̖��TM34 �īI���R�a��A ���¾�̖��1004-7018(2008)06��0021��03
0�� ��
�oˢ�p��늙C(���º��QBDFM)����20���o����Hunt������Լ��Б�늙C�Ļ��A�ϰlչ�����ģ�����һ�N�Y�����Ρ��Թ̿ɿ�������늙C�����ڟoˢ��r�¼��л\�͡��@���Б�늙C��늄��ͬ��늙C�Ĺ�ͬ���c�����н�������Ҫ׃�l���������������{��ϵ�y�Ĺ��������c���������ڽ����{�ق���ϵ�y��׃�ٺ��l�㉺�l�ϵ�y��Ŀǰ�����⌦BDFM���о��яČ�늙C�Y���ĸ��M�A�ΰlչ���������^�ʴ_���õĔ��Wģ��[1-3]�Լ��m����BDFM�Ŀ��Ʒ������Ⱥ�����˾W�jģ�͡�d��q�S���Wģ�͡�ͬ�����Wģ���Լ������@���Nģ�͵Ķ�N���Ʒ�����������BDFM��d��q�S���Wģ�͞���A������MATLAB�ď�����Ӌ�㹦�ܺ�sIMu��LINK�Ľ���ʽ���漯�ɭh��������BDf_M�Ġ�B���̵�S-Function�������о���BDFM�ڮ����\�Р�B�µĎN���ԡ�
1�oˢ�p��늙C��ԭ�������Wģ��
1��1�oˢ�p��늙C��ԭ��
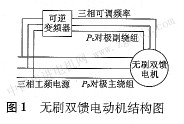
BDFM�Ļ����Y����һ�����ӡ�һ���D�Ӻ�һ������·���������b�Ѓ��������@�M��һ�מ鹦���@�M(���@�M)��ֱ�ӽӵ����l�Դ�ϣ���һ�מ�����@�M(���@�M)��ͨ�^׃�l���������l�Դ�ϣ���D1��ʾ��ͨ�^��׃׃�l����ݔ���Դ�l�ʿ����{���D�٣����FBDFMԪ���{�١��{�ٷ����c�O�����̓����Դ�ĵ�ݔ���l���ЈD1---�P��BDFM�ķ����D�ٱ��_ʽ��[1,5]
ʽ��fp��pp���քe�鹦���@�M���l�ʺ͘O������fe��pc�քe������@�M���l�ʺ͘O��������+����ʾ�����@�M�c�����@�M�a��ͬ�D��Ļ����ńݣ���-����ʾ�����@�M�c�����@�M�a�����D��Ļ����ńݡ���ʽ(1)��֪��ֻҪ׃�l��ݔ���l��һ����늙C���D�پ���ȫ�_�����D�ٿ���׃��ʮ�־��_����fc=0���������@�Mͨ��ֱ�����˕r�D�ٷQ����Ȼͬ���D�٣��������@�M��늉���0���������@�M��·��늙C�\���ڮ���늙C��B���ஔ��һ�_2(Pp+Pc)�O�Į���늄әC���������@�Mݔ�����ཻ���Դ�r��늙C�\�����p���{�٠�B��feǰȡؓ�r��늙C�D�ٷQ�遆��Ȼͬ���D�٣�fcǰȡ���r��늙C�D�ٷQ�鳬��Ȼͬ���D�١�
1��2�oˢ�p��늄әC�Ĕ��Wģ��
���˽���BDFM��ͨ�Ô��Wģ�ͣ������¼��O��
(1)��·�Ǿ��Եģ���Ӌͣ�
(2)�����F�p�Ͷ����C��Ӱ푣�
(3)��Ӌ�����@�M�Ϳ����@�M֮�g��ֱ����ϡ�
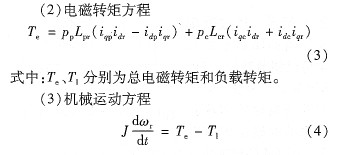
���������O��ǰ���£�����늙C����·��Փ���Զ��D�Ӹ���Ȧ�M�����������׃������Ȧ�M�ɶ˵�늉�����ݔ�������õ��oˢ�p��늙C�ľW�j�·���̣��ُĺ㹦��׃�Q�õ������ƌ�d��q�S���Wģ��ʽ�У�Pp��RpL��Lsp��Lpr�鹦���@�M�ĘO��������衢�Ըк��c�D�ӵĻ���;Pc��Rc��Lsc��Lcr������@�M�ĘO��������衢�Ըк��c�D�ӵĻ��У�Rr��Lr����r���D����衢�Ըк�늙C�ęCе���ٶȣ�uqp��udp��uqc��udc��uqr��uqp��udp��uqc��udc��uqr��udr������ʾ늉������˲�rֵ����p�鹦���@�M����c������@�M��s�鶨
�ӂȣ�r���D�ӂȣ�q��d��q��d�S������p��ʾ���r�g�Č�����
ʽ�У�J���D�әCе�T����T1��ؓ�d�D�ء�
�@�Ӿ���ʽ(2)��ʽ(3)��ʽ(4)������BDFM��d��q�S���Wģ�ͣ������^�õ�����BDFM���\�Р�B�ķ���ͺ��ε��]�h���ơ�
|