�������Ƹ������Դ���l����
�������ۏ������tӢ
(���B����WԺ���|�����B116600)
ժҪ�����˸��M���M늄әC�ľ��l���ԣ��OӋ��һ�N���з������ƭh���ĸߵ͉����·�����z�y���ƭh�������ڸߵ͉����·����������Դ�ĸ��l����������B���·�ĽY��ԭ���Ͳ��օ�����Ӌ�㡣�����N���·�M���������������Ԍ��Ȍ����Y��������ԓ�������@����������������������Դ�ľ��l���ԣ��˷��˺����ض����Դ�ĸ��l늴����͔ز��ܵ��^��F��
�P�I�~�����l���ԣ����·���z�y�h������������
�ЈD���̖��TM383��6 �īI���R�a��A ���¾�̖��1004��7018(2008)06��0034��03
0�� ��
���M늄әC�ǙC�һ�w��ϵ�y�е���Ҫ����Ԫ�������M늄әC��ݔ���D���c�\���}�_�l�ʵ��Pϵ�Q����l���ԣ�һ�㲽�M늄әC��ݔ�������S���\���l�ʵ����߶��½������˸��Ʋ��M늄әC�ľ��l���ԣ���߲��M늄әC���l�ε�ݔ�����أ����Բ�������Դ늉��ķ����������@�M���������Чֵ�������@�M��·�д���裬�Խ��͕r�g����T����ǰ�ߕ����µ��l�\�Еr�@�M����^�d�����ߕ����ӹ��ʓp�ģ����²��M늄әC���������ϵ�yЧ�ʽ��͡�ͨ�����øߵ͉���늻�����ز����Ʋ��M늄әC�ľ��l����[1-4]�����īI[1]������øߵ͉��ГQ������늙C�ڵ����\�D�r���õ͉���늣�����늙C�ĵ��l��ʎ�����l�\�Еr���ø߉���늣����늙C�ĸ��l�\�����أ��īI[2]������þ��з������ƭh���ĸߵ͉����·�����÷������Ƹ߉��ܵČ�ͨ�r�g���m����ͬ���\�D�l�ʣ����Ƹ��l�����������������˺����ز����·���i���r��ز��a���ĸ��l늴��������ҿ˷��˶��r�����c�}�_׃����ʽ���·�����M늄әC�\���l�ʷ��������ƣ��y�ڼ��ɵ�ȱ�c[2]��
1���з������ƭh���ĸߵ͉����·
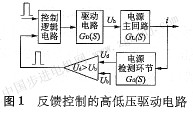
�ߵ͉����·�ַQ�p늉����·�����Է֞鶨�r�����c�}�_׃�������ơ��}�_׃����ʽ���·�Y�����Σ��������ʹ���}�_׃����ʹ���칤ˇ���s���ɱ��ߣ��Ҳ���ģ�K����Ŀǰ�õú��٣����r���Ƹߵ͉����·���Æη��B�|�l���������}�_���x��һ��ͬ����խ�}�_����߉���Ч������̖��ԓ�}�_�Č��Ȟ�η��B�|�l���ĕ��B�^�̕r����t�����@���^���и߉����ƹ��c�͉����ƹ�ͬ�r��ͨ����t�Ȳ���̫��Ҳ����̫С��̫��r�����M늄әC����^�dʹ�ɂ��ӹܟ������������M늄әC������̫С�r�����l���ܸ��Ʋ����@�����l�\�D�r����С���a��ʧ���F��һ���tȡֵ�c����·��늚�r�g����t���[2]��һ����t���_�����t�y�Կ��ơ��{���m����ͬ���\�D�l�ʺͲ�ͬ�@�M늸еIJ��M늄әC�����з������Ƶĸߵ͉����·��D1��ʾ��
�ڼ��ɵ�ȱ�c[2]��
1���з������ƭh���ĸߵ͉����·
�ߵ͉����·�ַQ�p늉����·�����Է֞鶨�r�����c�}�_׃�������ơ��}�_׃����ʽ���·�Y�����Σ��������ʹ���}�_׃����ʹ���칤ˇ���s���ɱ��ߣ��Ҳ���ģ�K����Ŀǰ�õú��٣����r���Ƹߵ͉����·���Æη��B�|�l���������}�_���x��һ��ͬ����խ�}�_����߉���Ч������̖��ԓ�}�_�Č��Ȟ�η��B�|�l���ĕ��B�^�̕r����t�����@���^���и߉����ƹ��c�͉����ƹ�ͬ�r��ͨ����t�Ȳ���̫��Ҳ����̫С��̫��r�����M늄әC����^�dʹ�ɂ��ӹܟ������������M늄әC������̫С�r�����l���ܸ��Ʋ����@�����l�\�D�r����С���a��ʧ���F��һ���tȡֵ�c����·��늚�r�g����t���[2]��һ����t���_�����t�y�Կ��ơ��{���m����ͬ���\�D�l�ʺͲ�ͬ�@�M늸еIJ��M늄әC�����з������Ƶĸߵ͉����·��D1��ʾ��
�_�h��C���\�ӿ��Ƶ���Ҫ�h��������^������
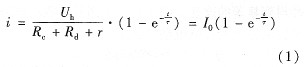
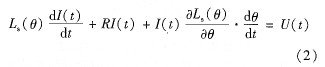
�OӋ����������������㣬�t�׳��F�����^�̵�ʧ����һ�㣬���M늄әC�����^����늙C�ľ��l��������Ӌ��_������������t�����·�ĽY�����������\���l�ʴ_�������M늄әC�����@�M�c�����Ľӿ���һ���͵�L��R��·����D3��ʾ��늙C�@�ML������M�������ַ��̣�
ʽ�У��ȡ���늙C�D�ǣ�
R��������·��늙C�@�M�Ŀ���裻
|