����DSP��SVPWM�ăɷN�_�Pģʽ�о�
�����£���ͦ
(��������WԺ���������47l0003)
ժҪ����Ҫ��B��sVPwM���g����ԭ������Ԕ��ӑՓ��sVPwM���g�ăɷN�_�Pģʽ��������Ӳ���_�Pģʽ�����c�����Y������Ӳ���_�Pģʽ����ܛ���_�Pģʽ��
�P�I�~��sVPwM��ܛ���_�Pģʽ��Ӳ���_�Pģʽ��DsP
�ЈD���̖��TM34 �īI���R�a��A ���¾�̖��1004��7018(2lIIl8)06��0046��02
0�� ��
�S�������Ӽ��g�İlչ��PwM��׃����늚�����еõ���Խ��Խ�V���đ��á�ͨ�^�����_�P���T�O��ͨ���B��PwM��׃�����Կ���ݔ��늉����l�ʺͷ�ֵ��ȫ����ʽPwM��׃�����P�I���}����Ό��r�صõ�PwM�_�P��̖���ڱ�����}���{�Ƽ��g�У�sVPwM��һ�N������PwM���g�������@�pС��׃��ݔ��������C���ɷּ�늄әC���C���p�ģ������}�_�D�أ�������ƺ��Σ����ֻ����F���㣬늉������ʸߣ�����ȡ�����ysPwM��څ�ݡ���늙C�����У�����늙C��늚�r�g�����^С��һ������������ܝM��Ҫ�����ԣ���׃�l�{�ٿ����I���Ô�����̖̎����DSP����ʹϵ�y��߿ɿ��ԡ������ܺ;S�o�����ȫ���ַ���lչ��������̖̎����DSP����Č��r̎���������\��������ʹ�Ô��ֻ�PWM���˸���V韵đ���ǰ����
1 sVPwM�{�ƵĻ���ԭ��
1 l����ԭ��
�ą����īI[6]����֪����ʸ���}���{�Ƽ��g(sVPwM)�Ǐ�늄әC�ĽǶȳ��l����늙C��PwM��׃������һ�w�����������ʹ늄әC�@�÷�ֵ�㶨�ĈA�δ�朞�Ŀ�ˣ������������Q����늉���늕r����늄әC�������月A����ʣ�����׃����ͬ���_�Pģʽ�a���Ĵ�朁��ƽ����ʴ�月A�Σ��Ķ��_���^�ߵĿ������ܡ�180����ͨ늉�����׃���а˷N�_�Pģʽ���քe�������˂�ʸ��������������Ч늉�ʸ���̓ɂ���늉�ʸ����SVtPWM��Ŀ�˾���ͨ
�^�����@Щ����ʸ���ĽM�ϣ�ʹ늉�ʸ����һ����Ҏ�ɈA�����D��
1��2 T1�cT2�Ĵ_��
T1�cT2�Ĵ_�����ԅ����īI[6]�õ���
ʽ�У�Tp���d�����ڣ�kp���{�ƶȡ�ʽ(1)�����늉�ʸ�����Õr�g������ֵ��ֻҪ֪���d��������Ϳ������늉�ʸ�������Õr�gT1�cT2��
2 sVPwM�_�Pģʽ
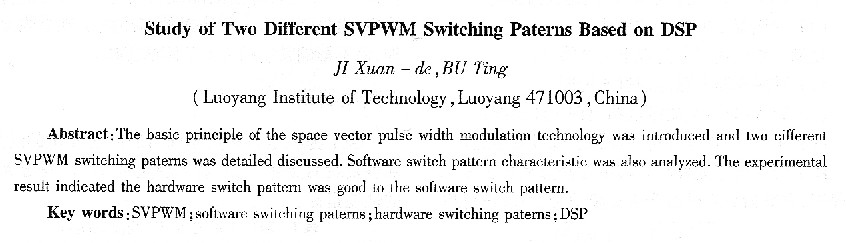
����DSP���FsVPwM���_�P��ʽ�ЃɷN��һ�N��Ӳ���_�Pģʽ����һ�N��ܛ���_�Pģʽ���oՓ��һ�N��ʽ����ÿ���d�������б�횽�QUx��Ux+60o��U000��U111���_�P�����}����ͬ���_�P��ʽ���a����ͬ���{��ݔ�����Ρ�ܛ���_�Pģʽ������DSP��ͨ�ñ��^���ܮa��sVPwM���Σ���Ӳ���_�Pģʽ������DsP��Ƕ�Ŀ��gʸ����B�CӲ��ģ�K�a��sVPwM���Ρ�
2��1ܛ���_�Pģʽ
ܛ���_�Pģʽ���ԅ����īI[6]�����īI[6]�У��o����ܛ���_�Pģʽ���_�P������������DsP�Л]�Ќ��TӲ����֧�ִ˷��������Ա�횰�svP- wM��Ӌ��Y��(ʸ���x������Õr�g)�D����ÿ����_�������}�����Õr�g���ٷ��䵽�����ı��^�Ĵ�����
2��2Ӳ���_�Pģʽ
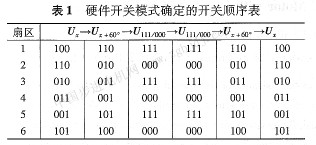
��1�o����Ӳ���_�Pģʽ���_�P��������TMS320LF2407���¼����������Ќ��T��Ӳ��(���gʸ����B�C)��֧�ִ˷�����ֻ�����ʸ��������^��ʽ���ƼĴ���(AcTRA��B)�еĻ������gʸ��λ�������oʸ�������Õr�gT1��T2���˱��^��Ԫ�ı��^�Ĵ���(cMPRl��cMPR2��cMPH4��cMPR5)���Ϳ��Ԍ��FsVPwM��
�@�N�_�Pģʽ������Ux-Ux+60o-U111/000-U111/000-Ux+60o-Ux��ʾ���@��x���Ԟ�O����60����120����180����240����300������z=0�����������Ԯ���Ӳ���_�Pģʽ�µ��_�P���к���׃������늉����Σ���Dl��ʾ��ͨ�^��l�͈D1���Կ��������oʸ�����Õr�g������ø�׃�Ϳ��ԝM���_�P�p����Сԭ�t��
3Ӳ���_�Pģʽ��ܛ���OӋ
|