����VISSIM��BUCK׃�Q����ģ����
��������o־��
(���ϴ�W�����K�o�a214122)
ժҪ������Dc��Dc׃�Q���Ļ���ԭ��������V1ssIM������BucK׃�Q���ķ���ģ�ͣ������p��ģ����Ʒ������ȭh��ģ������������ƭh����h��ģ������늉����ƭh����������Y���cPI���Ʒ�ʽ����^������Y�������˻�ģ���Ƶă�Խ�ԣ����о�BucK׃�Q���Ļ�ģ�����ṩ���·�����Ҳ���Mһ���о�����Dc��Dc׃�Q���Ļ�ģ�����ṩ����˼·��
O�� ��
Dc��Dc׃�Q���֞�PwM�ͺ��C���͡����IJ���PwM��BucK׃�Q������ͨ�^��׃ռ�ձȁ��{��׃�Q����
Ŀǰ������BucK׃�Q�����]�h���Ʒ�������Ҫ��늉��ͺ�����͡�늉��Ͳ���ݔ��늉��έh���ƣ�������Ͳ���늸������ݔ��늉��p�h���ƣ����·�Ы@�ø������Ϣ������Ч���^�á�
����������p�h���ƣ����õĿ������ܶ࣬���������PI��������ģ������������ģ�����������@���N�������У�PI�������Y��******���������_��Ӱ��^��ģ�����������OӋģ��Ҏ�t�����Y�����s����ģ���ƾ��к��������ԣ����������_�ӵ�Ӱ푣�����Ч���ã���E}�������OӋ����ģ�������^���Ρ�
������BucK׃�Q���Ļ�ģ���ƣ�һ��֞�r��׃�͕r׃�ɷN��ģ�档���У��r׃��ģ���nj�׃�Q��������׃�����뵽�ГQ�棬����׃�Q��������׃�����������ГQ�棬�Y���^���s�����r��׃��ģ�������OӋ�r�_����ģ���ϵ����
�C�ϱ��^���N���Ʒ��������IJ��Õr��׃��ģ��Ŀ��Ʒ�����VIssIM��һ�N������������Ӻ��Ԅӿ��ƽ�ģ�ͷ���ܛ����ԓܛ���܉��ṩ�Ѻõ��Ñ����棬���������S���Ŀ���Ԫ����͏���Ĕ��W�\��ģ�ͣ�߀�Ɍ���������ܛ���е�Ԫ���������D����ͨ�Ô��Wģ�ͣ����܉��cc++��DsP�ͼ��ɵ�Matlahģ�K������ͨ�^��VIssIM����BucK׃�Q���Ļ�ģ����ģ�ͣ��Ɍ���ģ���������������_�P�����I�錍�H�_�P���Ƶ��OӋ�ṩ����˼·��
1 BuCK׃�Q���Ĕ��Wģ��
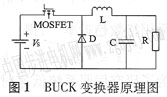
BucK׃�Q��ԭ��D��Dl��ʾ��
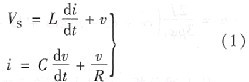
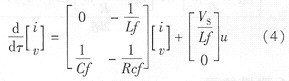
ȡ늸����i�����늉�v���B׃��������KvL��KcL(��������늉����������)���ɵ��_�P�܌�ͨ�r���ַ��̣�
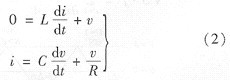
ͬ�����ɵó��_�P���P���r���ַ��̞飺
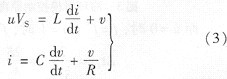
ʽ(I)��ʽ(2)�ϲ��ɱ�ʾ�飺
ʽ�У�Vs���Դ늉���L��늸�ֵ��c�����ֵ��R�����ֵ��f���_�P�l�ʣ�u������ʣ�u=l�r���_�P���_ͨ��u=O�r���_�P���P�ࡣ
ͨ�^�D�Q���ؘʻ�������=ft���ɵ�����ģ�ͣ�
2�p�]�h����
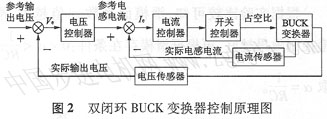
�D2��BucK׃�Q��������p�]�h����ԭ��D��BucK׃�Q����ݔ��늉�����ֵ�c���Hֵ��ƫ��ͨ�^늉��������õ�늸����������ֵ��ԓֵ���^����������c늸�������Hֵ����^�a���`��ֵ����ͨ�^�_�P�������a��BucK׃�Q���_�P�ܵĿ�����̖���{��늸������ݔ��늉�ֵ����Kʹ늸������ݔ��늉�ֵ��څ�ڷ��Bֵ��
�ڂ��y��������p�]�h�����У�늉�����������PI��PID�{�������������������һ���p����������h�����_�P������һ���x��PwM����h��������
3��ģ����
20���o60�����ǰ�K�W��s��V��Emelvanov��v��I��utkin�������׃�Y������(���º��QVsc)������Vsc�c��Ҏ����ϵ�y�IJ�֮ͬ̎����ϵ�y�ġ��Y����������˲׃�^���У�����ϵ�y��ǰ�Ġ�B(ƫ�����A������)�����S׃��ʽ����Ŀ�ĵ�׃������ʹϵ�y���A���Ļ���ģ�B�\�ӡ������们��ģ�B���Ќ��ɔ_�c�z�ӵIJ�׃�ԣ��@ʹ��Vsc���п���푑��������������_�Ӳ��`�����o��ϵ�y�ھ����R�����팍�F���εȃ��c��20���o80����Ժ���u�ܵ���ҕ��
һ��Ļ�ģ���ư�����ģ���OӋ�Ϳ������OӋ�ɲ��֣�������BucK׃�Q�����������uֻ��ȡ0��l���ʌ��们ģ�����OӋ��Ҫ�����ڻ�ģ���OӋ�ϣ������ڻ�ģ���OӋ���Іλ�ģ��0���p��ģ��ɷN�������Æλ�ģ�淽�����Ε����^��� |