�C���p��ʽ����늄�(d��ng)�C(j��)���O(sh��)Ӌ(j��)�c��(sh��)�(y��n)�о�
ꐾSɽ����ϼ����܊��
(�����I���I(y��)��W(xu��)�������������I150001)
ժҪ��������O(sh��)Ӌ(j��)��һ�N����ݔ�����C���p��ʽ�в�����늄�(d��ng)�C(j��)���������乤��ԭ���������ØәC(j��)�о����в�����늄�(d��ng)�C(j��)�ͽM�b����C������늄�(d��ng)�C(j��)���l���ٶ����ԣ��@���p���X�в�����늄�(d��ng)�C(j��)���C���p��ʽ����늄�(d��ng)�C(j��)��****���d�ٶȣ��Ҍ�(sh��)�(y��n)�@�õĂ���(d��ng)�ȱ��O(sh��)Ӌ(j��)����Փ����(d��ng)�ȴ�ٷ�֮��ʮ����(sh��)�(y��n)�Y(ji��)������ԓ늙C(j��)�܉���ٿɿ����\(y��n)�С�
0 �� ��
����(du��)�ڂ��y(t��ng)��늴�늙C(j��)������늄�(d��ng)�C(j��)���нY(ji��)��(g��u)��(ji��n)�Ρ��D(zhu��n)�أ��|(zh��)���ȴ��ٴ�Ť�ص����c(di��n)���Ɍ�(sh��)�F(xi��n)ֱ���(q��)��(d��ng)��푑�(y��ng)�죬�܉������i�����a(ch��n)���ň�(ch��ng)��Ҳ�������ň�(ch��ng)�ɔ_���܉��m��(y��ng)�ߵ͜���յȐ��ӗl������ˣ�����늄�(d��ng)�C(j��)���g(sh��)��20���o(j��)ĩ�õ�Ѹ�ٰl(f��)չ�����ں��պ��졢�C(j��)���ˡ���܇(ch��)�����ܶ�λ�x���͙C(j��)е���I(l��ng)��õ��ɹ��đ�(y��ng)�á�
�mȻ����늄�(d��ng)�C(j��)���е��ٴ����ص����c(di��n)����ֱ�����ìF(xi��n)�еij���늄�(d��ng)�C(j��)�(q��)��(d��ng)��늙C(j��)�D(zhu��n)������(du��)߀���^�ߡ���ͨ�^(gu��)�{(di��o)�l���{(di��o)�����ֶ�ʹ���\(y��n)���ڵ��٠�B(t��i)���t�����ٶȷ�(w��n)���Բ�Ć�(w��n)�}����˞�@���^���ٵ��(q��)��(d��ng)�C(j��)��(g��u)�����Č��C��Ħ������(d��ng)ԭ�푪(y��ng)�����в��ͳ���늄�(d��ng)�C(j��)�У�������늄�(d��ng)�C(j��)���C���p������Y(ji��)�ϣ��O(sh��)Ӌ(j��)��һ�N�C���p��ʽ����늄�(d��ng)�C(j��)��������乤��ԭ�������������C���p��ʽ����늄�(d��ng)�C(j��)�әC(j��)��
1�C���p��ʽ����늄�(d��ng)�C(j��)����ԭ��
l 1�в�����늄�(d��ng)�C(j��)�\(y��n)��ԭ��
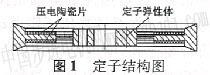
�в�����늄�(d��ng)�C(j��)�Ķ������ɉ���մɺͽ���?g��u)����wճ�Ӷ��ɣ������O(sh��)Ӌ(j��)���в�����늄�(d��ng)�C(j��)�����ڶ������±���քeճ�Љ���մ�Ƭ�ĽY(ji��)��(g��u)����D1��ʾ�����ӽ���?g��u)����w���±���ÿƬ����մ�Ƭ��һ�����Ҳ�늉�����(l��)��һ���v��������Ƭ�մ�
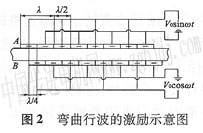
Ƭ�ķֲ��ڿ��g�����1��4���L(zh��ng)����Ƭ�մ�Ƭ�ɕr(sh��)�g�����1��4���ڵă�����l��̖(h��o)����(l��)��ÿ�༤��(l��)�a(ch��n)�����v���B�Ӻ��ڶ��ӵ���A���γɏ����в��������X�˵��|(zh��)�c(di��n)���E�A�\(y��n)��(d��ng)��ͨ�^(gu��)���D(zhu��n)�ӽ��|�������������(q��)��(d��ng)�D(zhu��n)�����D(zhu��n)���D(zhu��n)���D(zhu��n)��(d��ng)�����c�в��Ă��������෴���D2��늙C(j��)���в�����(l��)ʾ��D��
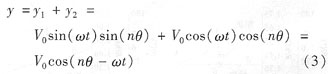
���ϡ����մ�Ƭ̎�քeͨ��V0sin(��t)��V0cos(��t)�ļ���(l��)��̖(h��o)���t����Ƭ����մ�Ƭ�����(d��ng)���̞飺
ʽ�У�V0�鼤��(l��)늉���������Ȟ���g�Ƕȣ��؞����(d��ng)���l�ʣ�t�����(d��ng)�r(sh��)�g��
��n�鶨�ӈA��
�ϵIJ���(sh��)���t�Ƀɂ�(g��)�����v�����ɵ��в����Ա�ʾ�飺
1 2�C��Ħ������(d��ng)���\(y��n)��ԭ��
�C��Ħ������(d��ng)�����C���X݆����(d��ng)��Փ�Ļ��A(ch��)�������һ�N����Ħ�����M(j��n)���\(y��n)��(d��ng)�̈́�(d��ng)�����f�Ă���(d��ng)��ʽ�������C������(d��ng)��Ħ���W(xu��)ԭ��������݆�̈́�݆�����˟o(w��)�X�Ĺ⻬���棬������݆�̈́�݆�^(gu��)ӯ��Ϯa(ch��n)�����^(gu��)ӯ���a(ch��n)��Ħ������Ҫ�����������Ķ��a(ch��n)���\(y��n)��(d��ng)�̈́�(d��ng)�����f����Ҫ�����ء�����(du��)���C���X݆����(d��ng)���C��Ħ������(d��ng)���мӹ����ס��ɱ��͡�����(d��ng)�^(gu��)�������(d��ng)���^С��������߂���(d��ng)���ȵȃ�(y��u)�c(di��n)����(d��ng)Ȼ�����C��Ħ������(d��ng)���Ä�݆����݆֮�g���^(gu��)ӯ��Ϯa(ch��n)����Ħ������(sh��)�F(xi��n)�\(y��n)��(d��ng)�����Ă���(d��ng)������O(sh��)Ӌ(j��)�r(sh��)����Ҫ����Փ�ϱ��ℂ݆����݆֮�g���\(y��n)��(d��ng)���Ƽ������F(xi��n)��
�в�����늄�(d��ng)�C(j��)�ͷֲ���A����ĝL��(d��ng)�w��ͬ��(g��u)�ɲ��l(f��)������ͨ�^(gu��)�������в�����늄�(d��ng)�C(j��)�D(zhu��n)���B�Ӽ���A���ϵ�����(g��)�L��(d��ng)�w�D����݆��ʹ��݆�a(ch��n)�������Եď���׃�Σ���݆�̈́�݆֮�gͨ�^(gu��)Ħ�����|��(sh��)�F(xi��n)�ٶȺ����صĂ��f���Ķ��γɹ̶����ε�����Ħ��ʽ�C��늙C(j��)���D3���D(zhu��n)���B�Ӽ�����݆�̈́�݆���b���P(gu��n)ϵ��(ji��n)���D����(d��ng)��݆�̶����D(zhu��n)���B�Ӽ�����(d��ng)����݆��Ą�(d��ng)�r(sh��)����݆���D(zhu��n)���B�Ӽ��͝L��(d��ng)�w�Ĺ�ͬ�����®a(ch��n)��׃�Σ��ں͝L��(d��ng)�w���|�c(di��n)̎�c��݆��ȫ���|���ڛ](m��i)�к͝L��(d��ng)�w���|̎��݆�̈́�݆��ȫÓ�_(k��i)���D(zhu��n)���B�Ӽ����B�m(x��)�D(zhu��n)��(d��ng)�����|��Ó�_(k��i)�ɷN��r����׃����ѭ�h(hu��n)����(f��)��
��(d��ng)���l(f��)�������D(zhu��n)����݆��݆�L��(d��ng)�����o(w��)����(d��ng)�L��(d��ng)���t��݆��֮һ��(y��ng)�D(zhu��n)�^(gu��)һ��(g��)ȡ�Q�����L(zh��ng)��ĽǶȡ���(du��)�ڱ��ģ���݆�̶������l(f��)����ݔ�룬��݆ݔ������(d��ng)���l(f��)�������D(zhu��n)һ�ܕr(sh��)����݆���D(zhu��n)���B�Ӽ������D(zhu��n)�����D(zhu��n)�^(gu��)�ĽǶȣ�
< |