����ֱ������늙C���Կ��_����
�˄��w���V�ң�����
(���ڴ�W���V�|����518060)
ժҪ��������ֱ������늙C�Cе�Y�����M�Լ��Կ��_����(AI)RC)���g�đ��á�ֱ������늙C��������ɱ��͡��Y�������Լ��ɿ��Ըߵȃ��c���Կ��_�����������m���Ȳ��Լ��ⲿ�ɔ_�����r�{���������ݏ������c��Փ���˲����Կ��_���g��ֱ������늙C���ٶ��{������͌��Y��������͌��Y�����������Կ��_��������PID�����������ڸ��N�ɔ_�����¿��ɔ_�������������Ժõ����c��
�P�I�~��ֱ����ϵ�y��ֱ������늙C���Կ��_����
�ЈD���̖��TM352��TM359��4 �īI���R�a��A ���¾�̖��1004��7018(2008)08��0001��04
0����
�S�������Ӽ��g��****���Ƽ��g�İlչ���˂�Խ��Խ�Pעֱ����ϵ�y��ԓϵ�y�o������κΙCе��ݔ������ֱ�ӿ��Ԍ�����D���əCе�ܣ����Fֱ���\�ӡ�����\�ӿ���ϵ�y���Ա���ز�t����һϵ�ЙCе����Ć��}�����⽛���ԵęCе�{���;S��������֮��ֱ����ϵ�y���п��ƺ��Ρ�푑��ٶȿ졢���ٶ�ݔ�������c��
ֱ������늙C����ֱ����ϵ�y�ķ������c����ֱ����ʽ늙C���(ֱ������ʽ늙C����ֱ���Б�ʽ늙C)��ֱ������늙C���нY�����Ρ��ɿ��Ըߵ����c�����Ҳ������κΏ��s���F�IJ����������w�ȡ�늙C���wֻ�������Ƭ�BƬ�;�Ȧ�șCе������ԓ늙C���OӋ�Y�����īI[1]��������B��
�������ؽ�Bһ�N���M�͵�늙C�Y�������Ҍ�һ�N���͵Ŀ��Ʒ������õ�ԓ늙C���ٶ��{���С�
1늙C�Y��
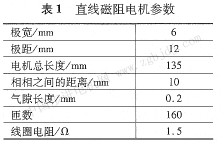
ԓֱ������늙C����һ���\��ƽ�_��һ�Mֱ����܉���BƬʽ�Ĺ��Ƭ�̶��ڶ��ӻ����ȡ��\��ƽ�_�Ͷ��ӻ����IJ��϶��ǽ����X�����̈́��ӺͶ��ӻ������|�����BƬ�Y������0��5 mm��Ĺ��Ƭ���ɣ��ӡ����ӷքe�B��50Ƭ����1��늙C�Cе��늚Ⅲ����
늙C����������Ȧ��ÿ����Ȧ���ǽ��ݽz�̶����\��ƽ�_�ϣ�ÿ����Ȧ���120 ����늚�Ƕȡ�ԓ�Y������ʹ�ø�����֮�g�Ļ����_����С [2]�����˱��C�^��ˮƽ����ݔ�����\��ƽ�_�Ͷ����X֮�g�Ŀ՚�϶�̶���0.2mm������ͨ늺�Ӷ���֮�g���������ܴ�ʹ���\�����g�ęCе�Y�����̣�ÿ��һ�����x�����Ƭ�BƬ�����T��i�o�����ӵĹ��Ƭ���A�U�̶��ڶ��ӻ����ϡ��D1��ֱ������늙C�����w����D�� 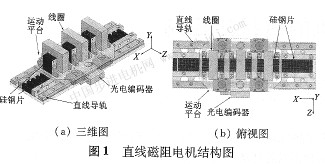 �c�����ڌ���Ҙ����ֱ��늙C���[1]������ԓ늙C�ęCе�OӋʹ�՚�϶���ӷ��̣���늙C�ęCе�����ԏ�������ͬ���ݔ���£�늙C�����^���ˮƽ����ݔ����
���ˌ��F****�����ٶ��{�������IJ����Կ��_���g���ٶȅ����M�п��ơ��Կ��_�㷨��****���c��������هԔ����늙C���Wģ����Ϣ������PID�㷨��������ģ�̓��ڻ����ĸɔ_Ӱ푡�����͌��ĽY���C����ԓ��������ʹֱ������늙C���m���ڹ����ھ��и��N�ɔ_�ĭh���¡�
2�Կ��_���������OӋ
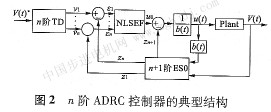
�Կ��_���������ָ�ۙ��(TD)���U����B�^�y��(EsO)�ͷǾ��Ԡ�B�`���������(NLSEF)�M�ɣ���D2��ʾ���ָ�ۙ���ṩ��ݔ����̖�Ŀ��ٟo���{�ĸ�ۙ�����酢��ݔ���ṩ���A������̖���U����B�^�y���Á���Ӌ������A��B׃���͌��_�ӵČ��r���������Ǿ��Ԡ�B�����ɽ��Ձ��ԔU����B�^�y����ݔ�������������������ĵ��`�����ɔ_���a����������
2��1�ָ�ۙ��(TD)
��늙C����ϵ�y�У�����̖(���ٶ�)һ�����ɽo��ݔ����̖(λ��)ͨ�^�����ֵȷ����õ����@�N����ʹ��Ӌ�������̖���кܶ���������̖�������_��ȡ[4]���ָ�ۙ��������ЧӋ�㲢��ȡ����̖[5]�����͵��ָ�ۙ����ݔ����̖�ԃɷN��ʽݔ����ݔ��ĕ��B�����Լ�ݔ����̖��һ�A�֡�һ�A�ָ�ۙ�������½Y����
ʽ�У�v�酢��ݔ����̖��v 1���ۙ��̖��r���� 0�ͦ� 0����Ҫ�{���ą���������fal�����ı��_ |