���چ�Ƭ�CPWM���ܵIJ��M늄әC�����OӋ
����Ⱥ1������2�����W��1
(1���A��W������100084��2���������պ����W������100083)
ժҪ��������ʽ���M늄әC�IJ����һ���1.8����O .9�������m��С�Ƕȿ��ƣ���Ҫ�����M늄әC������M�м��֡����چ�Ƭ�C��PwM���ܣ��OӋ�˲��M늄әC�����������˲��M늄әC�@�M늸Ќ�������BЧ����Ӱ푣�ͨ�^���̌��F���M늄әC�����24���֣��OӋ�˺�����b�ã�����Ӳ���·�ͳ����M��ԇ���C���Y�����������OӋ�������������Ŀ��Ƴ�����Ԍ��F���M늄әC�ļ����ӣ����`���ڿ��Խ��ܵķ����ȡ�
�P�I�~�����M늄әC�����֣�PwM
�ЈD���̖��TM383��6 �īI���R�a��A ���¾�̖����1004-7018(2008)08��0014��03
0����
Ŀǰ������Ӌ��C����̎�����g�͔�ģ�D�Q���g�������M늄әC�����@�M����M���}���{��(PwM)���ƣ��@�ð�һ��Ҏ�ɸ�׃���ֵ�ͷ�����@�M����������M늄әCһ���������֞����ɂ������������@�N���ַ����ѽ��^���죬����Ӳ���·һ���^���s�����`�аl�F�������Æ�Ƭ�C��PwM���ܮa��׃ռ�ձ���̖�����F���M늄әC���ֿ��ƣ��@�N�k�����Ԍ��F�^�ʴ_��λ�ÿ��ƣ�ʡȥ�˂��y�����·�еĔ�ģ�D�Qģ�K�Լ�����z�y����ģ�K��ֻ���ڳ����㷨�ϱ��^���s����Ҫ���^����{ԇ������
���Ļ����OӋһ�����εIJ��M늄әC�����������ȷ����˲��M늄әC�ļ���ԭ����Ȼ���M늄әC���@�M��Ȧ��Ч�鴮��늸к���裬ͨ�^���BЧ���������ó���Ȧ�����õ�һ��ռ�ձȵ�늉���̖�c늙C��Ȧ��������Pϵ�������@���Pϵ����늙C��Ȧ����һ��ռ�ձȵ���̖��ʹ���M늄әC�ľ�Ȧ���ʸ���a��һ�������D�ӣ����F���M늄әC�ļ��֡����ͨ�^��������ԇ��b����C���ֵ�Ч�����Y������������`���ڿɽ��ܵķ����ȡ�
1�����·�ĽM��
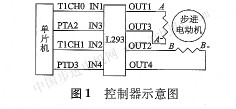
�Dl�����OӋ�IJ��M늄әC����ϵ�yʾ��D���Ɇ�Ƭ�C�l��������̖����늙C��оƬL293̎����ֱ�ӿ��ƃ�����ʽ���M늄әC���D��A��B�ɂ��˿���PwM�ڿ��ƣ�ݔ��һ��ռ�ձȵ�늉����Σ�A-��B-�ɂ��˿���i��O�ڿ��ƣ�ݔ�˸ߵ��ƽ��
��Ҋ��Ӳ�������·��Ͷ�Д�ģ�D�Q��������оƬ�����s�˳ɱ���
2����ԭ�������Ʋ���
ܛ�����F���M늄әC�����ӵĹ���ԭ����ͨ�^���Ʋ��M늄әC�����@�M�������ʹ�����㵽****ֵ֮�g�ж������������g��B���Ķ�ʹ�����Ĵň�ʸ������ͷ�ֵ����һϵ�з��������g��B��ʹ��늙C�е��D�خa��һϵ���c�ň�ʸ�����������g�B�����ˣ�ͨ�^��Ƭ�C���Ƹ����@�M����Ɍ��F�D�ط�����xɢ׃�����Ķ����F����ǵļ��֡�
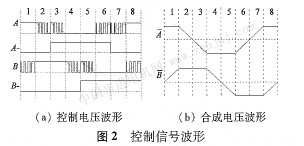
��������������ʹ��Ȧ�кϳ�������ư�����Ҏ��׃�����OӋ���M늄әC�Ă��˿ڵ�늉�������2a��ʾ�������@�M�ĺϳ�늉�����(���L�D���������弚�֞���)��D2b��ʾ������܉�_�������@�M�����A��B�ɶ˿�ռ�ձȵ��Pϵ������ͨ�^�����M늄әC�M�пɿصļ��ֿ��ơ�
�������Փ�Ϸ���ռ�ձ��c����Č����Pϵ��늙C��ÿ���@�M���Ե�Ч������늸еĴ��M�ϡ���оƬ1293�ăȲ��ஔ�ڃɂ�H�� [2]��ÿ��H�����늙C��һ���@�M��H����@�M�B�Ӻ�ĵ�Ч�·��D3��ʾ������A1��A2��A�˿ڿ��ƣ�Al�cA�˿��ƽ��ͬ��d2�c4l���ࣻ_4-l��4��2�� 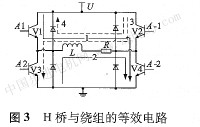 A-�˿ڿ��ƣ�Aһ1�c4�˿��ƽ��ͬ��Aһ2�cAһ1���ࡣ����ȡ�D2�е�2(1��2��4��7��������һ��)��B�M�з�����3(3��5��6��8��������һ��)��B���������c����ơ�2��B�£�d�˿ڞ�һ��ռ�ձ�׃���IJ��Σ�Aһ�˿�ʼ�K��͡��O��t��[O����T]��A1��A-2����ƽ�����O�܌�ͨvl��v4��ͨ���@�M�������u׃�����������D3��1��ʾ��t��[��T��T]��A2��Aһ2����ƽ�����O��v3��v4��ͨ���˕r�������ͻ׃�����������D3��2��ʾ�����������·��늉����̞�[3]��
|