�W�j��ģ�����ڲ��C�����еđ���
���ڣ��߇��٣��̼o�Q
(���K��W�����K悽�212013)
ժҪ�������û�ģ���Ʋ��Ԍ����،����M�п��Ʒ��棬�ڷ����Y���Y���W�j��ģ���Ʒ�������������W�j��ģ���ƵČW�������������m�����R�����������ԟo�F�ƽ����⺯���ă��c������Y���������W�j��ģ���Ʒ����ĸ�ۙЧ���ã�ϵ�y�`��С�����ԝM��C���˿��Ƶ�Ҫ���܉��Q�C���˵�܉�E��ۙ���}�����挍��C����ԓ���Ʋ��Ե����_�Ժ���Ч�ԡ�
�P�I�~�����C���ˣ���ģ���ƣ��W�j�����棻���Ʋ���
�ЈD���̖��TP273+��3 �īI���R�a��A ���¾�̖��1004��7018(2008)08��0032��04
0����
���C���˾��и߾��ȡ����ȴ��d�������\�ӑT��С��λ���`��e�۵����c���c���C���˳ʻ��a�Pϵ���ɞ�C�����о��I��ğ��c��
�������D�о�һ�N���Ʋ��ԣ���M�㲢�C���ĸ��ٶȡ��߾��ȵĿ���Ҫ���C���˱�����һ���߶ȷǾ���ϵ�y���\���^���д������ܴ�ĸɔ_���أ���Ҏ�Ŀ��Ʋ����ѽ����y�M�����Ҫ��׃�Y������ϵ�y�ڙC���ˡ����պ�����I�I�������������đ����о������C���˄����Wһ���ǷǾ��Ԅ����W��ͬ�r���ڶ�N�����AҊ���ⲿ�ɔ_�����ԙC���˿����ǽ����׃�Y������ϵ�y��Փ����Ҫ���íh��֮һ�����Ƕ����}һֱ��׃�Y�����Ƶğ��c����������ķ����кܶ࣬��������څ���ʷ�����֧·�M�з��棬Ȼ���û�ģ���Ƶ�Ч���ƌ�ϵ�y���棬���ڻ�ģ���ƵĶ����С��Ҫ��������������ГQ����Q���ģ���������һ�N���͵Ľ�Q������Ʒ����������W�j���ГQ헵������M���{�����Ķ��ĸ����Ͻ����˻�ģ���ƵĶ���
1֧·ģ��
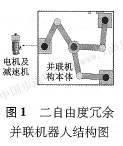
�����о��IJ��C�����Ƕ����ɶ������ಢ�C����[6]�������������Ӳ��֣�ÿ���ӂȰ���һ������MINAs Aϵ��Ac�ŷ�늙C�͜p���b�á���λ�Cͨ�^�̸߿��ƿ�GT-400-sV����������늙C���@�N�C������Ԫ�p�٣��Y���o�������ЏV���Č��Ãrֵ���о��rֵ���ڹ��I�о��ЏV���đ��á���D1��ʾ��
2�����ŷ���֧·ģ��
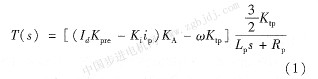
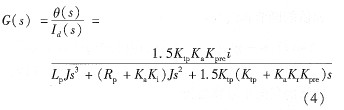
�����еĿ���늙C�����½����ŷ�늙C���������P�īI[7,8]��֪��������Ƶ����������B�ӵğoˢ�����ŷ�늙C��ݔ���D�ؿ��Ա�ʾ�飺
ʽ��Kpre�������̖ǰ�÷Ŵ�ϵ��88��Ki������h����ϵ��2.2��KA������{�����Ŵ�ϵ��6��Lp��Rp�����@�M��늸к���裬�քe��9��9 mH��3 7����Id�քe�������@�M�������Kr���ٶȷ���ϵ����i��p�ٱȞ�0.025��Ktp���D�س�����0��67 N��m��A��������:
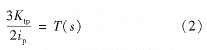
���⣬�cֱ��늙Cؓ�d�S�ķ�����ƣ��ڲ����]��Ч�ɔ_�ėl�������S�ϵ��D��ƽ�ⷽ�̞飺
��ʽ(1)��ʽ(3)�����Եõ����Ե�Ч�ɔ_���ؗl���µĂ��f������
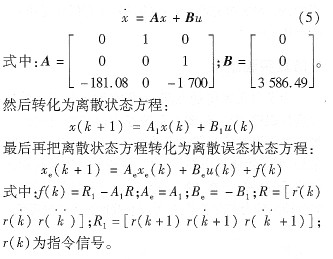
���˔������õ��Ă��f����Ȼ���D�����B���g����[1-2]�飺
3�������OӋ
3.l��ģ׃�Y������˼·[4]
��ģ׃�Y��(Vss)������һ�N��Ч�Ŀ��Ʒ�����һ��ɵõ����B�m�Ŀ����ɡ�VSS����Ҫ���c����ϵ�y���A�������OӋ�����ɔ_��������׃�������еď������ԣ��Լ����ײ��Ä���������ʩ��Ȼ���OӋVss�ăɂ������y�Ǵ_���ʹϵ�y����ģ�Ŀ��ƣ��Լ��pС̎�ڻ��ӑB�r�ć��@�ГQ��Ķ����}�����ɲ��_���ԵĽ���Ӌ������Ĺ̶��������棬��������̫С���tڅ���ٶȺ�С���෴����s�^�t���_��ģ�r����Ķ����^���x����ָ��څ���ɣ�
|