╗∙ė┌╔±ĮøŠWĮj─Ż║²┐žųŲĄ─ė└┤┼═¼▓ĮļŖäėÖCų▒Įė▐DŠž┐žųŲ
å╠ŠSĄ┬
(│Żų▌╩ąÅV▓źļŖęĢ┤¾īWŻ¼ĮŁ╠K│Żų▌213001)
š¬ę¬Ż║ßśī”╚ą(┤┼═¼▓ĮļŖäėÖCĄ─ų▒Įė▐DŠž┐žųŲ(DTC)┤µį┌▌^┤¾▐DŠž├}äėĄ─╠ž³cŻ¼╠ß│÷┴╦╗∙ė┌╔±ĮøŠWĮj┼c─Ż║²▀ē▌ŗĄ─ė└┤┼═¼▓ĮļŖÖCų▒Įė▐DŠž┐žųŲ▓▀┬įŻ¼ė├ė¢ŠÜ║├Ą─╔±ĮøŠWĮjĮ©┴óČ©ūė┤┼µ£ė^£yŲ„Ż¼īó─Ż║²┐žųŲ╦ŃĘ©ę²╚ļ─µūāŲ„ĀŅæBķ_ĻP▀xō±Ų„Ż¼═©▀^ī”▐DŠžš`▓ŅĪóČ©ūė┤┼µ£š`▓Ņ║═┤┼µ£╬╗ų├ĮŪĄ──Ż║²Ęų╝ēüĒīŹ¼F─µūāŲ„ķ_ĻPĄ─Ęų╝ē┐žųŲĪŻĘ┬šµ╝░īŹ“×ĮY╣¹▒Ē├„Ż¼┼c│ŻęÄDTCŽÓ▒╚Ż¼įō┐žųŲĘĮĘ©▐DŠžĪó▐D╦┘Īó┤┼µ£Ēææ¬╦┘Č╚┐ņĪóĒææ¬├}äėąĪŻ¼Š▀ėą┴╝║├Ą─ĘĆæBĖ·█Öąį─▄║═ā׫ɥ─äėæBĒææ¬Ż¼▀m║Ž╣ż│╠īŹļHæ¬ė├ĪŻ
ĻPµIį~Ż║╦«┤┼═¼▓ĮļŖäėÖCŻ╗╔±ĮøŠWĮjŻ╗─Ż║²▀ē▌ŗŻ╗ų▒Įė▐DŠž┐žųŲ(DTC)
ųąłDĘųŅÉ╠¢Ż║TM341Ż╗TP273+Ż«3 ╬─½Iś╦ūR┤aŻ║A ╬─š┬ŠÄ╠¢Ż║1004Ī¬7018(2008)08Ī¬0036Ī¬04
0ę²čį
ų▒Įė▐DŠž┐žųŲ(ęįŽ┬║åĘQDTC)╩Ū└^╩Ė┴┐┐žųŲ╝╝ągų«║¾░lš╣ŲüĒĄ─ėųę╗ĘNĖ▀ąį─▄Ą─Į╗┴„ūāŅlš{╦┘╝╝ągŻ¼įō┐žųŲĘĮĘ©▐Śē┴╦╩Ė┴┐┐žųŲųąļŖ┴„ĮŌ±ŅĄ─┐žųŲ╦╝ŽļŻ¼æ¬ė├┐šķgļŖē║╩Ė┴┐Ą─Ęų╬÷ĘĮĘ©Ż¼ų▒Įėį┌Č©ūėū°ś╦Ž┬ėŗ╦Ń▓ó┐žųŲļŖÖCĄ─▐DŠž║═┤┼═©Ż¼▓╔╚ĪČ©ūė┤┼µ£Č©Ž“Ż¼ĮĶų·ļx╔óĄ─ā╔³c╩Įš{╣Ø(Ban dĪ¬Ban d)«a╔·PWMą┼╠¢Ż¼Å─Č°ų▒Įėī”─µūāŲ„Ą─ķ_ĻPĀŅæB▀Mąą****┐žųŲŻ¼ęį½@Ą├▐DŠžĄ─ā×┴╝äėæBąį─▄ĪŻ╦³╩Ī╚ź┴╦╩Ė┴┐┐žųŲųąÅ═ļsĄ─┐šķgū°ś╦ūāōQŻ¼Š▀ėą┐žųŲĮYśŗ║åå╬Īó▐DŠžĒææ¬čĖ╦┘Īóī”▐DūėģóöĄ▓╗├¶ĖąĄ╚ā׳cĪŻ
─┐Ū░DTCęč│╔╣”æ¬ė├ė┌«É▓ĮļŖäėÖCŻ¼Į³─ĻüĒę╗ą®īWš▀ķ_╩╝ų┬┴”ė┌įō┐žųŲĘĮ╩Įį┌═¼▓ĮļŖäėÖC╔ŽĄ─═žš╣Ż¼│§▓ĮīŹ¼F┴╦ė└┤┼═¼▓ĮļŖäėÖC(ęįŽ┬║åĘQPMSM)Ą─ų▒Įė▐DŠž┐žųŲĪŻĄ½į┌PMSMųąė╔ė┌▐Dūėė└┤┼┤┼═©Ą─╩╝ĮK┤µį┌Ż¼╩╣ė├┴ŃļŖē║╩Ė┴┐▒M╣▄─▄┐žųŲČ©ūė┤┼µ£ė^£yŲ„ū▀ū▀═Ż═ŻŻ¼ģs¤oĘ©┐žųŲ▐DŠž╦▓ķg£pąĪŻ¼ę“┤╦ų╗─▄╩╣ė├Ę┤ļŖē║╩Ė┴┐üĒīŹ¼FŻ¼Č°Ę┤ļŖē║╩Ė┴┐Ą─æ¬ė├ėų═∙═∙╩╣PMSMį┌▐DŠžĒææ¬╝ė┐ņĄ─═¼ĢrŻ¼Ģ■ę²Ų┤┼µ£║═▐DŠžĄ─äĪ┴ęūā╗»Ż¼Å─Č°ė░ĒæDTCĄ─ĘĆæBąį─▄[1]ĪŻ×ķ┴╦ęųųŲ▐DŠž├}äėŻ¼ėąą¦╠ßĖ▀PMSMų▒Įė▐DŠžŽĄĮyĄ─äėĪóņoæBąį─▄Ż¼▒Š╬─╠ß│÷╗∙ė┌╔±ĮøŠWĮj║═─Ż║²▀ē▌ŗĄ─PMSM DTC▓▀┬įŻ¼╝┤└¹ė├╔±ĮøŠWĮjśŗįņČ©ūė┤┼µ£ė^£yŲ„Ż¼æ¬ė├─Ż║²▀ē▌ŗ═Ų└ĒįOėŗ─µūāŲ„ĀŅæBķ_ĻP▀xō±Ų„Ż¼Å─Č°╩╣PMSM DTCŽĄĮy½@Ą├▌^ÅŖĄ─¶ö░¶ąį║═ā×┴╝Ą─äėæBąį─▄Ż¼╬─ųąī”┤╦▀Mąą┴╦Ę┬šµĘų╬÷║═“×ūCĪŻ
1 PMSM DTC┐žųŲ└Ēšō
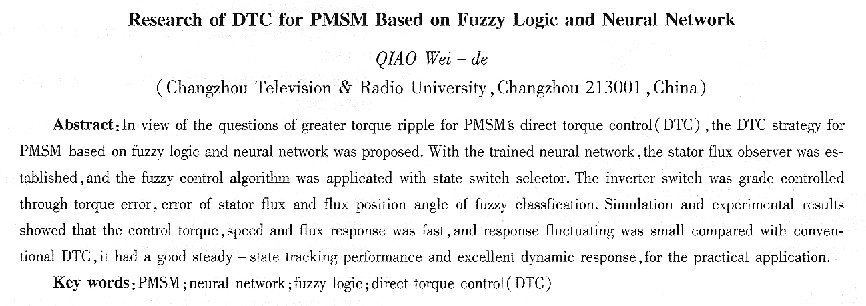
łD1×ķė└┤┼═¼▓ĮļŖäėÖCČ©Īó▐Dūė┤┼µ£Ą─┐šķg╩Ė┴┐łDĪŻ”Ęr×ķ▐Dūė┤┼µ£┐šķg╩Ė┴┐Ż¼ė╔ė┌▐Dūė╩Ūė└┤┼¾wŻ¼”Ęr×ķę╗│Ż┴┐Ż╗”Ęs╩ŪČ©ūė┤┼µ£┐šķg╩Ė┴┐Ż¼”Ęr┼c”ĘsŖAĮŪĘQ×ķ╣”ĮŪ”─ĪŻ«öČ©Īó▐Dūė┤┼śO▌SŠĆ
ųž║ŽĢrŻ¼╣”ĮŪ”─×ķOĪŻ╗“180ĪŻŻ¼ā╔┤┼śOŽĄĮy╠Äė┌ĘĆČ©╗“▓╗ĘĆČ©ŲĮ║ŌĀŅæBĪŻ╣”ĮŪ”─=OĪŻĢrų╗┤µį┌ŲĮ║Ō┤┼└Ł┴”Ż¼Č°▓╗┤µį┌╚╬║╬▐Däė┌ģä▌Ż╗╣”ĮŪ”─=180ĪŻĢr╠Äė┌▓╗ĘĆČ©ŲĮ║ŌĀŅæBŻ¼╔į╬ó╝ėę╗ö_äė▒Ń┴ó╝┤╗ųÅ═ĄĮ╣”ĮŪ”─=OĪŻĄ─ĀŅæBŻ¼╦∙ęįį┌ęį╔Žā╔ĘNĀŅæBŽ┬Ż¼ļŖÖCŠ∙▓╗─▄ą²▐DĪŻų╗ėą▒Ż│ų╣”ĮŪ”─Ī┘0ĪŻĢrŻ¼ļŖÖC▓┼─▄▀B└mą²▐DĪŻ
ė╔ļŖ┤┼īWįŁ└ĒĄ├│÷Ż¼PMSM▌ö│÷ļŖ┤┼▐DŠž┼cČ©ūė┤┼µ£Ę∙ųĄĪó▐Dūė┤┼µ£Ę∙ųĄęį╝░Č©Īó▐Dūė┤┼µ£Ą─ŖAĮŪ(╣”ĮŪ)”─Ą─š²Žę│╔š²▒╚ĪŻīŹļH▀\ąąųąŻ¼▒Ż│ųČ©ūė┤┼µ£Ę∙ųĄ×ķŅ~Č©ųĄŻ¼ęį│õĘų└¹ė├ļŖäėÖCĶFą─Ż╗PMSM▐Dūė┤┼µ£Ę∙ųĄ═©│Ż╚Ī║ŃųĄŻ¼ę¬Ė─ūāļŖäėÖC▐DŠžĄ─┤¾ąĪŻ¼┐╔ęį═©▀^Ė─ūāČ©Īó▐Dūė┤┼µ£Ą─ŖAĮŪ(╣”ĮŪ)”─Ą─┤¾ąĪüĒīŹ¼FĪŻČ°═¼▓ĮļŖÖC▐Dūė┤┼śO═¼▐Dūėę╗Ųą²▐DŻ¼▓╗╚▌ęū┐žųŲŻ¼╦∙ęįDTc═©▀^▀xō±▓╗═¼Ą─Č©ūėļŖē║╩Ė┴┐š{╣ØČ©ūė┤┼µ£ą²▐D╦┘Č╚┼cĘĮŽ“Ż¼Š═┐╔ęį╦▓ĢrĖ─ūā╣”ĮŪ”─Ż¼Ą├ĄĮ┐ņ╦┘Ą─▐DŠžĒææ¬Ż¼Å─Č°īŹ¼F▐DŠžĄ─äėæB┐žųŲŻ¼▀@š²╩ŪPMSM DTcĄ─╗∙▒Š╦╝Žļ[2,3]ĪŻDTc▌^▓╔ė├═©ė├ūāŅlŲ„Ą─╩Ė┴┐┐žųŲĘĮ╩ĮŽÓ▒╚Ż¼▓╗ąĶę¬ę└ō■╗“▌ö╚ļ£╩┤_Ą─═¼▓ĮļŖÖCģóöĄŻ¼╦³░č▐DŠžų▒Įėū„×ķ▒╗┐ž┴┐Ż¼▓╗╩Ū═©▀^┐žųŲļŖ┴„Īó┤┼µ£Ą╚┴┐üĒķgĮė┐žųŲ▐DŠžŻ¼Č°╩Ūī”▐DŠž▀Mąąų▒Įė┐žųŲŻ¼ę“┤╦┤¾┤¾£p╔┘┴╦╩Ė┴┐┐žųŲ╝╝ągųą┐žųŲąį─▄ęū╩▄ģóöĄūā╗»ė░ĒæĄ─å¢Ņ}Ż¼╝╚ų▒Įėėų║å╗»ĪŻ
2 PMsM╔±ĮøŠWĮj─Ż║²DTcŽĄĮy
2.1┐žųŲŽĄĮyĮYśŗ
PMSM╔±ĮøŠWĮj─Ż║²DTcŽĄĮyĮYśŗ╚ńłD2╦∙╩ŠĪŻłD2ųąŻ¼”ž×ķĮoČ©ĮŪ╦┘Č╚Ż¼”ž×ķīŹļH▐DūėĮŪ╦┘Č╚Ż╗T e×ķĮoČ©ļŖ┤┼▐DŠžŻ¼T e×ķīŹļHļŖ┤┼▐DŠžŻ╗”Ę s×ķĮoČ©Č©ūė┤┼µ£Ż¼”Ę s”┴Īó”Ę s”┬×ķČ©ūė┤┼µ£į┌”┴-”┬ū°ś╦ųąĄ─Ęų┴┐Ż╗u s”┴ |