���ڴ���^�y��������ͬ��늄әCʸ������ϵ�y
��ͦ������
(������ͨ��W������100044)
ժҪ�������M�ͷe������������ͬ��늄әC(PMSM)�Ĵ���^�y�h����ͨ�^���Ӵ���^�y���F��PMSM�ŘOλ�õĹ�Ӌ���Y��ʸ�����Ƙ��ɟoλ�Â�����ʸ������ϵ�y��ԓ���M�ͷe���������˼��e���������ij�ֵ���ʴ_��ֱ��ƫ�ƵȆ��}���ֿ��ԫ@�ñȵ�ͨ�V�������������ܡ�����Y��������PMSM�oλ�Â�����ʸ������ϵ�y���o�B���ܺã����ɔ_��������
�P�I�~������ͬ��늄әC���oλ�Â�����������^�y����ʸ�����ƣ�����
�ЈD���̖��TM341 �īI���R�a��A ���¾�̖��1004��7018(2008)08��0040��03
0 ����
����ͬ��늄әC(���º��QPMSM)�����w�eС�������p�������ߡ�Ч�ʸߡ������������Ժõȃ��c���V�������ڬF����������ϵ�y�С�PMSM���\�ӿ�����Ҫ���_���D��λ�ú��ٶ���̖�팍�F�ň������ڂ��y���\�ӿ���ϵ�y�У�ͨ���������D׃�������늾��a����z�y�ٶȺ��D��λ�á��@Щ�������o늙C���\�Ў�����һϵ�еĆ��}���Ӵ���늙C�ijߴ磬������ϵ�y�Ŀɿ��ԣ��������{��ϵ�y�ijɱ�����ˣ����ßoλ�Â��������Ƽ��g�ͳɞ�PMSM�{��ϵ�y��һ���lչ����
Ŀǰ�������W���ѽ�����˺ܶ�늙C�D���ٶȺʹŘOλ�õĹ��㷽����������Փ�ϵ����c�����·֞飺(1)����PMSM����늴��Pϵ�����D�ٵķ�����ԓ����Ӌ�㺆�Ρ��ӑB�����죬���nj�늙C�����������Բ(2)����늙C�OЧ���Ĺ�Ӌ������ԓ��������ه��늙C�Ļ������̺ͅ���������ȫ�ٷ����Ȍ��Fλ�ù�Ӌ������Ҫ�~���Ӳ���·��������ϵ�y�ɱ��Ͳ������ԣ�(3)���ڸ��N�^�y�����g��λ�ñ��R�������@�N�����ӑB���ܺá������Ըߡ����������ԏ���Ȼ���㷨���s��Ӌ�����ܴ��ܵ�Ӌ��C��̎����Ӌ���ٶȵ����ƣ�(4)�˹�������Փ���A�ϵĹ��㷽������������Ҫϵ�y���_�Ĕ��Wģ�ͣ����ҿɱ������ڷǾ���ϵ�y�����Ǐ��s���㷨�����ص�Ӌ��������ϵ�y��������Č���֪�R�s����������@Щ�����ڌ��H�еđ��á�
���IJ�����һ�N���M�Ĵ���^�y�������F�����Ӵ�朵��^�y�ʹŘOλ�õĹ�Ӌ�����������͵ğoλ�Â�����PMSM SVPWMϵ�y�����������ϵ�y��늙C������׃�������õ������ԣ����^���ٷ����^���\�Еr��ȡ������Ч����
1 PMSM�Ĕ��Wģ��
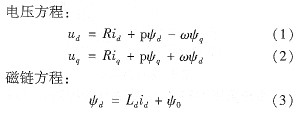
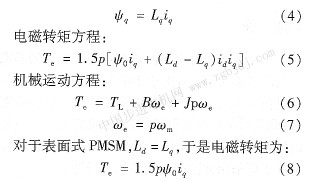
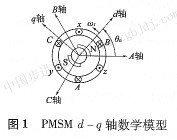
�齨��PMSM��d��q�S���Wģ�ͣ����������¼��O������늄әC���F��ͣ���Ӌ늄әC�еĜu���ʹŜ��p�ģ�늄әC������錦�Q������Ķ��õ����º�����늉�����朡�늴��D�غ͙Cе�\�ӷ��̡�
ʽ�У�ud��uq��id��iq����d����q��Ld��Lq�քe��d��g�S����늉����������朡�늸У�R�鶨����裬p��O������m���D�ӽ��ٶȣ���e��Cе���ٶȣ�Te��늴��D�أ�TL��ؓ�d�D�أ���0�������w��朣�J���D�ӑT����B������ϵ����p��������ӡ���Dl��ʾ��
2����^�y��ԭ��
PMSM���ģ�͂��y�ϲ���U-Iģ�ͣ�
�@�Nģ����麆�κͳ��ã����ڸ����ȸߣ����Ѓ��ݣ����ڵ�������e��ʽ�е�Ris헵��`��ʹģ�;��ȇ����½���ͬ�r�����ڲ��ü��e��������Ӌ���Ӵ�朣�����ֱ��ƫ�ƺͳ�ʼֵ���}��������ͬ��늄әC�D�����г�ʼ���ţ��D�ӴŘO��λ�������ɱ���؎����D�Ӽ��ŵij�ʼֵ�ڷ�ֵ����λ�ϵIJ��ʴ_����ˣ�����������һ�N���͵ĸ��M�ͷe�������^�y���Ӵ�朡�ԓ���M�ͷe���������m����ͬ��늙C�����д�朽o����һ��ֵ�������m���ڴ�朹�Ӌ���ڳ�ʼ�l�����ʴ_�����ء�
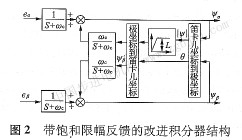
����������ĸ��M�e�����Y����D2��ʾ��
ԓ�^�y���nj��T�齻��늙C��朹�Ӌ���OӋ�ġ��ڽ���늙C�� |