�����ŷ�ϵ�y(t��ng)��H���������Ʋ���
���ʯ1��������2
(1.��ͨ�I(y��)��W(xu��)�����K��ͨ226007��2.���չ��̿Ƽ��W(xu��)Ժ������ʏ��241000)
ժҪ������ͬ��늄�(d��ng)�C(j��)�����ŷ�����ϵ�y(t��ng)�У��_��(d��ng)�ɞ�Ӱ�ϵ�y(t��ng)���ܵ���Ҫ���أ��ڽ�������ͬ��늄�(d��ng)�C(j��)��������ģ�͵Ļ��A(ch��)�ϣ�����˻���H������Փ�Ę�(bi��o)��(zh��n)H���Ʒ���������(j��)����ͬ��늄�(d��ng)�C(j��)����������ģ���O(sh��)Ӌ(j��)��������H������������Y(ji��)����������H���ƾ������õ�������(w��n)���ԺͿ��ɔ_�ԡ�
�P(gu��n)�I�~������ͬ��늄�(d��ng)�C(j��)���ŷ�ϵ�y(t��ng)���������ƣ�H������
�ЈD���(l��i)̖(h��o)��TM383��4+1 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2008)08-0043��02
0����
����ͬ��늄�(d��ng)�C(j��)(���º�(ji��n)�Q(ch��ng)PMSM)ʸ������ϵ�y(t��ng)�ڽ����ŷ��I(l��ng)��õ��V����(y��ng)�ã����@�N���Ʒ���Ҫ����늄�(d��ng)�C(j��)�ľ��_ģ�ͣ���PMSM��ģ���Ǹ��A�Ρ��Ǿ��ԡ���(qi��ng)��ϵ�[1]������ģ�͵Ľ����^(gu��)���н�(j��ng)�^(gu��)��һ����������O(sh��)�����Ԃ��y(t��ng)�Ŀ��Ʋ��Ծʹ����^����`����M(j��n)�o�����ӹ��Ⱦ���(x��)�����I(l��ng)�_��(d��ng)�����ϵ�y(t��ng)�����½�����Ҫ���ء��������ϵ�y(t��ng)�����ܣ���회�(du��)�_��(d��ng)�M(j��n)�����ƣ�����(du��)�_��(d��ng)�M(j��n)���a(b��)������ϵ�y(t��ng)�Ĕ_��(d��ng)��Ҫ�Ѕ���(sh��)�z��(d��ng)�́�(l��i)���ⲿ�ĸɔ_�������ŷ�ϵ�y(t��ng)�еĔ_��(d��ng)��Ҫ�Dž���(sh��)�ބ�(d��ng)��ᘌ�(du��)PMSM�ڃ������D(zhu��n)����(bi��o)ϵ�µĔ�(sh��)�W(xu��)ģ�ͣ������H������Փ������H���Ʋ��ԣ�ͨ�^(gu��)��(du��)ϵ�y(t��ng)�_��(d��ng)���a(b��)����ϵ�y(t��ng)�����^�õĿ��_���ܺ��S�����Լ��^�ߵļӹ����ȡ�
1��(bi��o)��(zh��n)H����������˼��
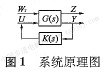
��(bi��o)��(zh��n)H���������Ƶ�ԭ���Y(ji��)��(g��u)�D[3,5]��1�D1��ʾ��
�D�У�Wr��ɔ_��̖(h��o)��U��
����ݔ����̖(h��o)��y�鱻�^�y(c��)����̖(h��o)��z��ϵ�y(t��ng)�����u(p��ng)
�r(ji��)��̖(h��o)��G(s)���V���،�(du��)��K(s)����O(sh��)Ӌ(j��)�Ŀ�������
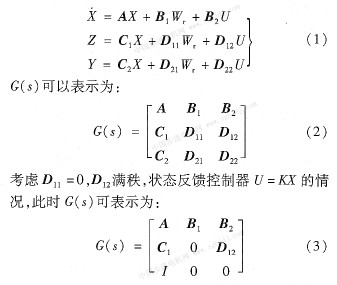
���V���،�(du��)��G(s)�Ġ�B(t��i)���g�ɱ�ʾ�����£�
�ĸɔ_��̖(h��o)Wr���u(p��ng)�r(ji��)��̖(h��o)z���]�h(hu��n)���f����(sh��)Gzw(S)�Ɍ�(xi��)�ɣ�
���īI(xi��n)[2]��֪���˕r(sh��)����ϵ�y(t��ng)��(du��)�ڽo����y������ʹ�]�h(hu��n)ϵ�y(t��ng)�Ƕ��η�(w��n)���Ġ�B(t��i)����������U=KX�ij�ֱ�Ҫ�l���ǣ�
��Riccati����ʽ�� 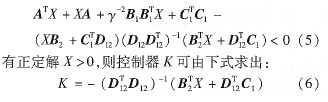 2 H����PMSM�Ĕ�(sh��)�W(xu��)ģ��[1]
������һ����������O(sh��)��PMSM�ڃ������D(zhu��n)����(bi��o)ϵ�µĔ�(sh��)�W(xu��)ģ�͞飺
ʽ�У�ud��uq��id��iq�քe��d�S��g�S���S늉����S�����ld��lq�քe�鶨��늸���d�S��q�S�ϵĵ�Ч늸У���f���D(zhu��n)�ӄ�(l��)�Ŵ���^(gu��)�����@�M�Ĵ�朣�rs�鶨����裬��e���D(zhu��n)�ӽ��ٶȣ�p�������ӣ�p��늄�(d��ng)�C(j��)�O��(du��)��(sh��)����m���D(zhu��n)�әC(j��)е�D(zhu��n)�٣�J���D(zhu��n)��(d��ng)�T����T1��ؓ(f��)�d�D(zhu��n)�ء�
��(j��ng)�^(gu��)������PMSM�\(y��n)��(d��ng)���̞�[6]��
����ͬ��늄�(d��ng)�C(j��)���õ����D(zhu��n)�Ӵň�(ch��ng)����ʸ�����Ʒ�ʽ������d�S�ϵ����id=0��ͨ�^(gu��)����q�S�ϵ����iq���ɿ����D(zhu��n)�٣��˕r(sh��)��d=��f�����ɵã�
���o����q����mֵ�鳣��(sh��)��ӛ�馷qg����mg�O(sh��)��(sh��)�Hֵ���O(sh��)��ֵ֮������q=��qһ��qg������m-��mg����(du��)����(d��o)�ɵã�
�ŷ�ϵ�y(t��ng)�У�ؓ(f��)�d�D(zhu��n)�غͶ�������趼��(hu��)��һ����ƫ��ֵ�� |