���ڸ��M�μ��η������IJ��M늄әCPID����ϵ�y
��ƽ�������K���w���A
(�Ϻ���ͨ��W���Ϻ���200240)
ժҪ����ȼ�ͱ�Һλ�������;���ԇ��_�������У��������M늄әC�Ĕ��Wģ�ͣ��OӋ�˲��M늄әC��PID����ϵ�y�����c�U����������ø��M�μ��η����FPID����������ͨ�^Matlab���̷��棬�Y��������ͨ�^���M�μ��η�������PID���ƣ������^�õĄӑB푑����ԡ�
�P�I�~�����M�μ��η������M늄әC��PID����
�ЈD���̖����V1383��6 �īI���R�a��A ���¾�̖��1004��7018(2008)08��0049��03
O�� ��
ȼ�ͱ�Һλ������(���º��QTsG���)��������܇����λ�y�������|���ĺÉ�ֱ��Ӱ�����λ�y���ľ��ȣ��Ķ��Pϵ����܇�Լ������İ�ȫ���ʌ����M���;���ԇ���������܅��������ИO����Ҫ�Č��H���x[1]��
��ԓԇ��_�У�����Ҫ���nj��F���M늄әC�ľ��_���ơ�P1D���ƾ���ֱ�^�����ڌ��F�����B���ȸ��Լ������Ժͷ������^�õȃ��c��PID�����еą���ki��kp��kd���xȡֱ��Ӱ�������Ч����ͨ���@���������Ǹ������������ģ����dz�Ҏ��PID�������������@�ñ��^�ֲڣ��������ą�����������****�ġ���ˣ��҂����ø��M�μ��η��팍�F���M늄әCPID�������ą���������
���M�μ��η���һ�N���yֱ�ӌ������������ڢ��S���}�����Ì�N+1����ʼ�c����c�M�ɵĆμ����M��Ӌ�㣬���^�μ�����c��Ŀ�˺���ֵ����ͨ�^�����μ����^����c�M���������ƽ�****�c�ķ���[2]��
1ϵ�y�M�ɼ�����ԭ��
1��1ϵ�y�M�ɿ�D
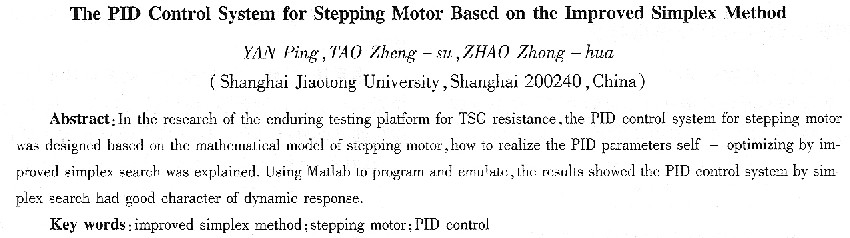
��ϵ�y����Pc�C�����ؙC������������ֱ�^�ĈD�λ��������档ϵ�y�M�ɿ�D��D1��ʾ��
1.2 TsG���ϵ�yԭ��
��ԇ��_����ͬ�r�ָ�ʽ�͝�ʽ�ɽM�M��ԇ��ʽԇ���gЪ�[��(���d�l�ʞ�5 Hz)����ʽԇ���B�m�[��(�����l�ʞ�0.5��2 Hz)��ÿ�Mԇ�ÿ�ο�ͬ�r�z�ylO��TSc��衣�ڲ��M늄әC�����£�����10��TSG���ͬ�r�\�ӣ�ͬ�r�ɔ����ɼ����xȡÿ������ֵ�������f�o�����惦����͔���̎�������Д�ɼ�������ֵ�Ƿ��A���O������ֵ����ӛ���һ���\�����ڵij��˴Δ��ͳ��˵����ֵ����ԇ���^���У����˵ĴΔ����^�A���O���ĴΔ��r��ԇ�ֹͣ��ͬ�r�l������
l.3�����]�h�ŷ�ϵ�y
�ڱ�ԇ�ϵ�y�в��ò��M늄әC�������Ԫ�������F�M�o�\�ӡ�������߿��ƾ��ȣ������M늄әC������PID���ơ�
�ڲ��M늄әC�b���ϣ����M늄әC���S�B���U���Ӝp�ٙC������ͨ�^�X݆��Ƥ�����֣���늙C�ĈA���\���D�Q��Ƥ����ֱ���\�ӡ�Ƥ��ֱ���\�ӵ�λ������ָᘺͿ̶ȳ߁�������ʾ��Ƥ���Ƅ�ͬ�r����һֻ��Ȧ�λ��(λ�Ƃ�����)�D�ӣ�λ�Ƃ�����ݔ����늉��ɶ����ر�ʾ���M늄әC�Ľ�λ������늙C�Ľ�λ��������늙Cؓ�dָᘌ�λ��ֱ�^�ر�ʾ������ԓָ���0��16 cm���г̷������\�ӣ�������λ�÷���늉�������O��5 V��Ӌ��Cͨ�^�ɼ�λ�Ƃ�����ݔ���ķ���늉����Ϳɵõ���ǰ늙Cؓ�dָ�λ�ã��cָ��ָ�λ�ñ��^���õ�λ��ƫ�����PID�����㷨�ɵÿ��������ٿ���늙C��ָ��λ���\�ӡ�
2���M늄әC��PID��������
2��1���M늄әC���Wģ��
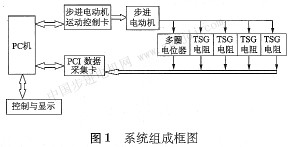
����������ʽ���M늄әC��늚��c늴Ż�·�Y�����侀�Ե�ֵ��·��D2��ʾ[3]��������ʽ
���M늄әC�ķ���ģ�Ϳɚw�Y������@�M��·��늉����̺��D�ӵ��\�ӷ��̣�
ʽ�У�eA��eB��A��B�@�M�е��\��늄ݣ�UA��UB���늉���RA��RB��A��B�@�M�ľ�Ȧ��裻iA��iB���@�M�����LA��LB���@�M���ԸУ�MAB���@�M�Ļ��У�ͨ�����ಽ�M늄әC���g�����^С�����Ժ��Բ�Ӌ�����������\�ӷ��̺Ͳ��M늄әC�ĄӑB���ԣ����M늄әC����ͨ늕r����λ��푑��Ă��f�����飺
|