�����ŷ�늄�(d��ng)�C(j��)�ľ��������ٿ���ϵ�y(t��ng)
�ε½ܣ�������
ɽ�|������W(xu��)��ɽ�|�Ͳ�255049
�ЈD���̖(h��o)��TM383��4+2 �īI(xi��n)��(bi��o)�R(sh��)�a��E
���¾�̖(h��o)��l004-7018(2008)08-0060��01
0���}���
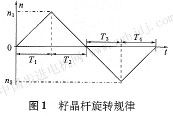
���w�������_�l(f��)�����Ǯ�(d��ng)ǰ��һ�(xi��ng)�߾����n�}����ֱ���ξ��w���|(zh��)���ľ��w�����������ܵ��˂�����A���چξ��������_�l(f��)�^���У���ʹ��ֱ���ξ��w���L(zh��ng)���ã�����(j��)�ξ������L(zh��ng)Ҏ(gu��)�ɣ���Ҫ��(du��)�Ѿ��U�����D(zhu��n)�ٶȌ�(sh��)ʩ�����������ơ�����ƵĿ��wҪ���ǣ�һҪ���D(zhu��n)ƽ��(w��n)����Ҫ�ٶȾ��������������r(sh��)�g���{(di��o)����Ҫ�����D(zhu��n)�ٶ�****ֵ���{(di��o)������һ��(g��)���ڃ�(n��i)���\(y��n)�D(zhu��n)Ҏ(gu��)�ɿ��ÈD1���������D�У�n1��n2���������D(zhu��n)��****�ٶȣ�Ҫ����1��510 r/mn������(n��i)�����{(di��o)��(ji��)��
T1��T3�����D(zhu��n)�����ٕr(sh��)�g��T3��T4�鷴�D(zhu��n)�����ٕr(sh��)�g��������Ҫ����1��60 s��(n��i)�������{(di��o)��(ji��)��
����֮�⣬Ҫ����T1��T2��T3��T4���ϵ��ٶ�׃���龀�ԡ�
1Ӳ���O(sh��)Ӌ(j��)
����Ҫ�������D(zhu��n)�ٶ�������{(di��o)���ټ��������ٕr(sh��)�gҲҪ����{(di��o)���ұ��־����P(gu��n)ϵ��һ��늙C(j��)�o���M����O(sh��)Ӌ(j��)Ҫ��(j��ng)�������^���Q������Ŀǰ�^�����еĆ�Ƭ�C(j��)���]�h(hu��n)�����ŷ�
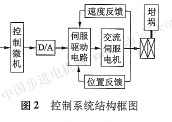
�(q��)��(d��ng)ϵ�y(t��ng)�팍(sh��)�F(xi��n)���]�h(hu��n)�����ŷ��(q��)��(d��ng)ϵ�y(t��ng)�н����ŷ��(q��)��(d��ng)���ͽ����ŷ�늄�(d��ng)�C(j��)�ɲ��ֽM�ɣ���(n��i)�O(sh��)�ٶȷ�����λ�÷��������п��ƾ��ȸߡ����ܷ�(w��n)�����ɱ��^�͡��{(di��o)ԇ�S����ȃ�(y��u)�c(di��n)���������N���Ʒ�ʽ��λ�ÿ��ơ��ٶȿ��ơ��D(zhu��n)�ؿ��ơ����ڱ��n�}Ҫ��(sh��)�F(xi��n)�ٶȿ��ƣ����x�����ٶȿ��Ƽ�����ɡ������ϵ�y(t��ng)�Y(ji��)��(g��u)��D��D2��ʾ��
1.1�ŷ��(q��)��(d��ng)늄�(d��ng)�C(j��)���x��
�ŷ�늄�(d��ng)�C(j��)��ֱ���ͽ���֮�֡�Ŀǰ���½����ŷ�늄�(d��ng)�C(j��)ϵ�y(t��ng)�ԃr(ji��)���^�ߡ������½����ŷ�늄�(d��ng)�C(j��)����ϵ�y(t��ng)�Ĺ������Կ�֪�����ٶȿ��Ʒ�ʽ�£�����ݔ���D(zhu��n)���cݔ��늉���С�����ȣ����� n=kvʽ�У�v���ŷ��(q��)��(d��ng)����ݔ��늉�����|v|��lO V��n���ŷ�늄�(d��ng)�C(j��)��ݔ���D(zhu��n)�٣�k�����ϵ��(sh��)������w��(sh��)ֵ���ڽ����ŷ��(q��)��(d��ng)���и���(j��)Ҫ���O(sh��)�á�����ŷ�늄�(d��ng)�C(j��)Ҫ��(sh��)�F(xi��n)�D1��ʾ�����D(zhu��n)���Σ�ֻҪ�O(sh��)Ӌ(j��)һ��(g��)���������ɡ�
���˝M���΄�(w��)Ҫ���C���ƾ��ȣ������ŷ�ϵ�y(t��ng)���x��Panasonlc MINAs Aϵ�е�MsDA043A1A-2�ͽ����ŷ��(q��)��(d��ng)����MsMA042A�����ŷ�늄�(d��ng)�C(j��)�����������ཻ��220 V��늣���(n��i)������250p��r����(qi��ng)ʽ���a��(�ֱ��ʞ�(10000)���~���D(zhu��n)��3000 r��min���Ԏ�λ�÷������ٶȷ����·������RS485��RS232Cͨ�ſ�[1]������λ�íh(hu��n)���桢�ٶȭh(hu��n)���桢�ٶȭh(hu��n)�e�֡��ٶ�ǰ���ȶ��(xi��ng)�����{(di��o)���·���m��(d��ng)�{(di��o)�����ϸ�����(sh��)�Ϳ�ʹ�ŷ�늄�(d��ng)�C(j��)��(y��n)����ָ���(d��ng)�������cͬa(ch��n)Ʒ��ȣ������w�eС�������p�����ƾ��ȸߡ����ٶȺá����ڌ�(sh��)�F(xi��n)�ȃ�(y��u)�c(di��n)��
1.2���������O(sh��)Ӌ(j��)
�����O(sh��)Ӌ(j��)�Ŀ�����ݔ��늉����{(di��o)����(sh��)�^�࣬һ���·�y�ڌ�(sh��)�F(xi��n)���ʲ���Ŀǰ�^�����еĆ�Ƭ�C(j��)�O(sh��)Ӌ(j��)�����ˌ�(sh��)�F(xi��n)����(sh��)�ھ��ĺ��ٶȿ���ͬ���M(j��n)�У��������p��Ƭ�C(j��)���Ʒ�����ĿǰǶ��ʽ��Ƭ�C(j��)�N��࣬�C�������܃r(ji��)��ȣ�ϵ�y(t��ng)����һƬ89c52��(sh��)�F(xi��n)����(sh��)�ھ��ļ�����(sh��)��(sh��)�r(sh��)�@ʾ�Ȳ���������һƬ89c52�팍(sh��)�F(xi��n)��(du��)�ŷ�늄�(d��ng)�C(j��)�Č�(sh��)�r(sh��)���ơ����������c(di��n)�Ƿքe�Ԏ�8 MB��(n��i)��EEPROM������Ҫ�U(ku��)չ��(n��i)�档
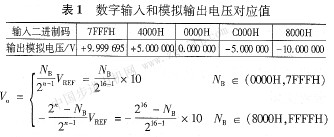
���ˌ���Ƭ�C(j��)ݔ���Ĕ�(sh��)����̖(h��o)�D(zhu��n)�Q�ɾ���ģ�M늉���D��A��(sh��)ģ�D(zhu��n)�Q�·����Burr-Brown��˾���a(ch��n)�ĸ߾���DAc725������һ��(g��)�p16λ�Ĕ�(sh��)ģ�D(zhu��n)�QоƬ����(n��i)��늉�����(zh��n)��ݔ���Ŵ���������i 10 V���p�O��ģ�M늉�ݔ��������16λ���M(j��n)�Ʋ��Д�(sh��)��ݔ��ӿڡ����c8λ��Ƭ�C(j��)AT89c52�m��(d��ng)�B�ӣ��ͿɌ�(du��)��(sh��)����̖(h��o)��(sh��)�F(xi��n)ģ�M�D(zhu��n)�Q��ȥ�����ŷ�늄�(d��ng)�C(j��)��Ҫ�����D(zhu��n)���������������c(di��n)��һ���D(zhu��n)�Q���ȸߣ������`��H��ٷ�֮��0 003�����Ǹ��ٔ�(sh��)�ֲ���ݔ�룻�����p�O��ģ�M늉�ݔ��������(g��)�·�����r(sh��)��ݔ��ݔ���P(gu��n)ϵ���1��ʾ��
ʽ�У�NB�dž�Ƭ�C(j��)16λ���M(j��n)��ݔ����늉�����(zh��n)VREF=10 v��ݔ��늉�������-10 V��ʮ10 V��늉��ֱ�����O.305 mv[2]��
1��3��(sh��)��(j��)�����·�O(sh��)Ӌ(j��)
����AT89C52�����Ќ�(du��)����(sh��)�ھ��ĵĔ�늱��湦�ܣ����O(sh��)Ӌ(j��)����̓�MI2C���g(sh��)������E |