���ڻ�ģ��������^�y����ֱ���D�ؿ���
���ģ��R����
(�������I(y��)���W���������7I0072)
ժҪ�����˽�Q�������׃������朹����Ӱ������ˮ��ͬ��늄әCֱ���D�ؿ���ϵ�y(t��ng)�Ļ��A�ϣ�����˻�ģ���m����������^�y�����o������Փ�C�������ƌ�������������m���ʣ�������M�з��档����Y��������������軬ģ���m���^�y��������ϵ�y(t��ng)���������׃�������m�����ܣ��˷��˶������׃������朹����Ӱ푣���Ч�������ϵ�y(t��ng)ݔ���D�صĿ��ƾ��ȡ�
0�� ��
ֱ���D�ؿ����Єe��ʸ�����ƽ����˼�룬���ö��Ӵň������ֱ���ڶ�������ϵ�¿���늴��D�أ��Ķ��@���^�õĄ��o�B(t��i)���ԡ�Ȼ��ֱ���D�ؿ���Ҫʹ��늙C�Ķ����������㶨�Ӵ�朣���������֕��S���ضȺ�����l�ʰl(f��)��׃�������l(f��)��׃���͕������Ӵ�朵��^�y�ʴ_���½����Ķ�����늴��D�ص�٥������`���ˣ���������茍ʩ�ھ��^�y�����ֱ���D�ؿ���ϵ�y(t��ng)���ȵ�һ�N��Ҫ������
��������S���W�����@�������˴����Ĺ������īI[3]������ڮ���늙C�(q��)��ϵ�y(t��ng)�У�ͨ�^ʹ��PI��ģ������������������`���M�п��ƣ��Ķ��_���{(di��o)��(ji��)��������Ŀ�ģ��@�N��������Ҫ˼�������ö�������`���������M���a�����@�N�����mȻ��һ���̶��Ͽ��Խ�Q�������׃�������Ć��}�����ǿ���ϵ�y(t��ng)�е�PI���������䅢��(sh��)���ض��Լ��h(hu��n)����׃���dz����У����Ԍ��ڸ߾���Ҫ���@�N�������y�M�㡣�īI[4]�����ʹ�ö��Ӵ�朿��������㶨������`��@�N���Ʒ�������Ҫ˼����īI[3]�����ƣ����nj�����`��ͨ�^PI����������������M���a�������ڻ�ģ׃�Y�������܉�ܺõؿ˷��h(hu��n)����ϵ�y(t��ng)��Ӱ푣�ʹϵ�y(t��ng)���к��Ŀ��ɔ_���ܺ����m�����ܡ��b�ڴˣ���������ˑ��û�ģ���m���^�y������������M���ھ��^�y�������^�y�Ķ�������M�д�朹��㡣����������@�N�����܉�˷��������׃����ϵ�y(t��ng)������Ӱ푣������^�������m���ԣ������ֱ���D�ؿ���ϵ�y(t��ng)�ľ��ȣ�������ֱ���D�ؿ���ϵ�y(t��ng)�Ą��o�B(t��i)���ԡ�
1����ͬ��늄әCϵ�y(t��ng)����
����ͬ��늄әC��d��q����ϵ(�D�����D����ϵ)�µ�늉��ʹ�朷��̞飺
ʽ�У�p�������ӣ�R�鶨����裻�؞��D�ӽ��ٶȣ���f�������w�a(ch��n)���Ĵ�朣�Ld��Lq����d����q��id��iq��Ud��Uq�քe��늸С���朡����������늉���d��q�S�ϵķ�������ʽ(3)��ʽ(4)����ʽ(1)��ʽ(2)��늉���ꇷ��̣�
ʽ�У�p�������ӡ��ɦ�-������ϵ(�oֹ����ϵ]��d��q����ϵ���D�Q�Pϵ��
�����[ʽ����ͬ��늄әC����Ld=Lq���tʽ(7)�ֿ��Ԍ��ɣ�
��ʽ(8)�ֿ����Ƴ���
ʽ�У�e����e�¡����Uչ��늄ӄݣ�
2��ģ���m���^�y�����OӋ
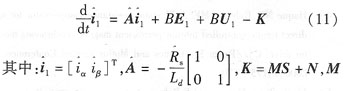
����(j��)ʽ(10)���x��ģ���m���^�y���飺
K���^�y�����档�ģ�棺
����
�x��Lyapunov����(sh��)��
��ʽ(13)����ʽ(16)�ã�
����(j��)Lyapunov��(w��n)���Զ�����Ҫʹ�^�y����(w��n)���������
|