�o�W(w��ng)��늄ӄ݂�������PWM�ɿ��������о�
���IJ������F�ܣ����F��
(�����I���I(y��)��W�������������I150001)
ժҪ��ᘌ��ɂ����������ĸ߳ɱ����ͷ�(w��n)���Ե��T��ȱ�c�����һ�N�o�W(w��ng)��늄ӄ݂�������PWM�ɿ��������Ʋ��ԡ��ڌ�����늾W(w��ng)늄ӄݷ��̷����Ļ��A�ϣ����ý������ƫ���{��(ji��)���ؘ��˾W(w��ng)��늄ӄݵķ�ֵ����ǣ�������PWM�ɿ�������Matlab����ģ����C��Փ�����_�ԡ�����Y��������ԓϵ�y(t��ng)�܉�Ѹ�ٜʴ_���q�R��늾W(w��ng)늄ӄݣ������܉��Ԇ�λ������(sh��)�\������������׃�����F(xi��n)���������p���ݔ��
�P�I�~��PWM���]�h(hu��n)늾W(w��ng)늉��ؘ�����λ������(sh��)�\��
�ЈD���̖��TM34 �īI���R�a��A ���¾�̖��1004��7018(2008)12��0001��03
0����
PWM�������Ǒ����}���{�Ƽ��g�l(f��)չ������һ�N�Դ׃�����������F(xi��n)�˾W(w��ng)��������һ������\���چ�λ������(sh��)�����������p���ݔ���������Թ�(ji��)�s��Դ��߀�ܜpС늾W(w��ng)��Ⱦ������Դ����oȱ�����ϵ�y(t��ng)���C���͟o�����}Խ��Խ���صĽ��죬�@�N�܉��p���Ч�ʂ�ݔ������׃�l����u�ɞ��о����c[1]��
�S����PWM���������Ʋ����о��IJ�������[2]�������������Ć��}��uͻ��������Ă������������ӳɱ���߀���Ӵ�ϵ�y(t��ng)�IJ���(w��n)���ԣ�������ijЩ����ĭh(hu��n)���ª����Ă��������������b�IJ����㡣���Mһ������PWM����������̖�z�y��ToshiHiko Noguchi�ȌW�����^����˟o��������PWM���������Ʋ��ԣ��õ��ˏV�����Pע��
ͨ����r�£�PWM�����������N���������W(w��ng)��늄ӄ݂��������W(w��ng)�������������ĸ��늉�����������ɷN��������ϵ�y(t��ng)���^�����^�����o������Ҫ���ã����һ����r�����Ա��������W(w��ng)��늄ӄ݂������t����ͨ�^Ӌ��õ��������о��ˆT���^����ˎN�o늾W(w��ng)늄ӄ݂�������PWM���������Ʋ���[3-5]���������ý������ƫ���{��(ji��)�ؘ���늾W(w��ng)늄ӄݣ�Msttab����Y��������ԓϵ�y(t��ng)�܉�ʴ_���R��늾W(w��ng)늄ӄݣ������܉��Ԇ�λ������(sh��)���F(xi��n)��������׃�������F(xi��n)���Gɫ���׃�Q����һ���F(xi��n)�����x��
1�o�W(w��ng)��늄ӄ݂�������PwM�ɿ�����
1��1�W(w��ng)��늄ӄ��ؘ�ԭ��
��늾W(w��ng)늄ӄݵ��ؘ���Ҫ�ЃɷN������һ��ͨ�^ؓ���ʵĹ�Ӌ���ؘ�늾W(w��ng)늄ӄ�[6]���@��һ�N�_�h(hu��n)��Ӌ�㷨��������Ȳ��ߣ�������ؓ���ʹ�Ӌ�㷨�У����ں�����헣���������ɔ_����һ�N�����ǻ��ڽ������ƫ���{��(ji��)�ľW(w��ng)��늄ӄ��ؘ�[7-8]���@��һ�N�]�h(hu��n)��Ӌ�㷨����������^�ߡ����IJ��õ��ǵڶ��N������
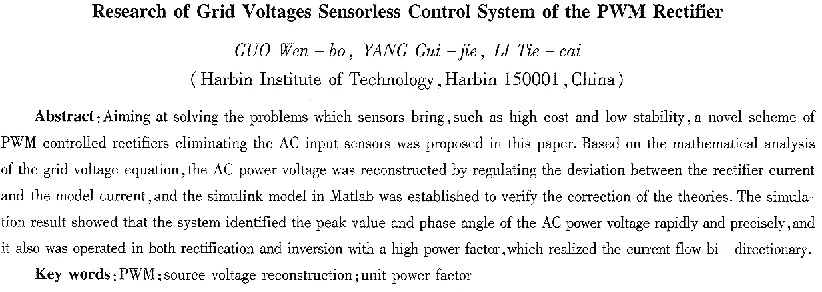
�D1��o�W(w��ng)��늄ӄ݂�������PWM�������ؓ�D[9]��
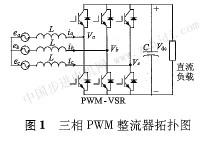
��������ƽ��ϵ�y(t��ng)���f���O��늄ӄݵķ�ֵ��Em,���ٶȞ�أ���ʼ�ǶȞ��0���Ц�=��t+��0���t����늾W(w��ng)늄ӄݵı��_ʽ��
���������oֹ����ϵ(a-b-c)�У�����늉�ͨ��߀���Ա�ʾ���£�
ʽ�У�i����������ݔ�������v��ݔ��늉���������ڹ�Ӌ��Ǧȵ�����׃�Q��������Ӌֵ��׃�Q��ꇞ飺
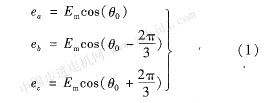
����늉��h���D�����������D����ϵ(d,q)�п��ԵÄٵ���
������֮�g���Pϵ��D2��ʾ��
���ψD�и����������m����ʽ���t���Եõ����µ�늉����̱��_ʽ��
��ʽ��5����ʽ��6���xɢ����������ã�
ʽ�У�Ts��PWM�ɘ����ڡ�ͨ�^ʽ(7)�������xɢ���_ʽ��
|