�ͳɱ����Ž����ŷ�ϵ�y(t��ng)�OӋ
�n��̫1����С�A2
(1�Ї�Ӌ���WԺ���㽭����310018��2�����I(y��)���g(sh��)�WԺ���㽭����310018)
ժҪ�����һ�Nʹ�þ��Ի����������������C����Ԫ��������ͬ��늄әC�����ŷ�����ϵ�y(t��ng)��ԓϵ�y(t��ng)���þ��Ի��������������늾��a�����_�P�������������ľ��Ի���������ݔ����̖�еõ��D(zhu��n)��λ�ú��ٶ���Ϣ���ڴ˻��A�ϣ��o��һ�Nֱ���������oֹ����ϵ�Юa(ch��n)�����������Ĵň���������㷨��������Ľ����ŷ�ϵ�y(t��ng)�����ڹ��I(y��)�p�x�C�У����F(xi��n)�Y(ji��)�����������OӋ����ϵ�y(t��ng)�������У������^���ԃr�ȡ�
�P�I�~�����Ի������������ŷ����ƣ��ň�������ƣ�����ͬ��늄әC
�ЈD���̖��TM383��4+2 �īI���R�a��A ���¾�̖��1004��7018(2008)12��0016��04
0ǰ��
�ڻ�������ͬ��늄әC�Ľ����ŷ�ϵ�y(t��ng)�У�һ����ôň�������Ƶȷ���[1-2]�팍�F(xi��n)늙C�ٶȡ�λ�õĜʴ_���ƣ��@Щ���Ʒ���Ҫ�r�ɼ��D(zhu��n)��λ�á��ٶȷ�����̖���Ķ����F(xi��n)��늙C���������С������Ŀ��ơ��ڬF(xi��n)�н����ŷ�ϵ�y(t��ng)�У��D(zhu��n)��λ�á��ٶȵęz�yһ��ͨ�^��늙C���w�ϰ��b�����_�P������������һ�����ȵ�����ʽ��늾��a���팍�F(xi��n)[3-4]��
ʹ���_�P����������������ʽ��늾��a�����鷴��Ԫ���Ľ����ŷ�ϵ�y(t��ng)�ɱ��C�^�߿��ƾ��ȣ����ǣ���������Ԫ����ʹ��������늙C����ɱ������칤���������(sh��)���ҽ�����ϵ�y(t��ng)�ɿ��ԣ����⣬�ň�������Ʒ��������漰�oֹ����ϵ�����D(zhu��n)����ϵ֮�g��ʸ��׃�Q�\�㣬�@�N�\������M�^��惦��Ӌ���YԴ���g��������ϵ�y(t��ng)�ɱ��͌��F(xi��n)�y�ȣ��Ķ�ʹ��ԓ��ͽ����ŷ�ϵ�y(t��ng)�y����һЩҪ������ܡ��ͳɱ��Ĉ���(�繤�I(y��)�p�x�C��)����[6]��
ᘌ��������}������߿������ܡ��p�ٌ��F(xi��n)�ɱ��Ƕȳ��l(f��)�����Ľ�Bһ�Nʹ�þ��Ի��������������D(zhu��n)��λ�á��ٶȷ���Ԫ������������ͬ��늄әC�����ŷ�ϵ�y(t��ng)��Ԕ���o�����D(zhu��n)��λ�ú��ٶȵęz�y�������ڴ˻��A�ϣ������īI�Y(ji��)Փ���o��һ�N����Ҫ�M������׃�Q�Ĵň�������Ʋ��Ԍ��F(xi��n)�������ڹ��I(y��)�p�x�C���S늙C����ϵ�y(t��ng)�еđ��ýY(ji��)�����������OӋ�Ľ����ŷ�ϵ�y(t��ng)�������У������^���ԃr�ȡ�
l�D(zhu��n)��λ�á��ٶșz�y
�ڬF(xi��n)�л����_�P����������������ʽ��늾��a��������ͬ��늄әC�����ŷ�ϵ�y(t��ng)�У��_�P������������Ҫ�Á��_��늙C���ӕr�D(zhu��n)�ӵĴ��λ��(���Ȟ�60��늽Ƕ�)���Ա���������Ԍ����ݔ���m�������@�M�����F(xi��n)늙C���ӣ�ͬ�r����늙C�\���^���������ṩ����Q����̖����늾��a����Ҫ����늙C�\�Еr�D(zhu��n)��λ�Ùz�y�������F(xi��n)�D(zhu��n)���ٶ�Ӌ�㡣�����D(zhu��n)��λ����Ϣ�Ǵň�������Ʒ������M������׃�Q���ٶȿ��ơ�λ�ÿ��Ƶ��\��r�����ݔ����Ϣ����ɘӾ��Ȍ�����Ч��������ҪӰ푡�
���˽���ϵ�y(t��ng)�ɱ��ұ��C�������ܣ��������һ�N���ھ��Ի��������������ͽ����ŷ�ϵ�y(t��ng)��ԓϵ�y(t��ng)ʹ�Ãr������ľ��Ի�����������������ͬ��늄әC�ϰ��b������ʽ��늾��a�����_�P������������ͨ�^�����Ի���������ݔ����̖�M�Йz�y�����F(xi��n)늙C���ӡ�����Q���D(zhu��n)��λ�ú��ٶ���Ϣ������
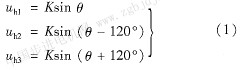
�ԆΘO������ͬ��늄әC���������������Ի����������Ա˴����120��늽Ƕȵķ�ʽ���b�ڶ����ϣ���������ͬ��늄әC��϶�ň����������Ҳ��������Ի���������̎�����Ҳ���϶�ň��Еr����ݔ��늉���̖uh1��uh2��uh3�c��϶�ň��ֲ��IJ�����ͬ���ҷ�ֵ�̶�[7]������
ʽ�У�K���϶�ň���������늄ݷ�ֵ��K=KhIhBm��Kh������������Ļ���늄�ϵ��(sh��)����λ��V��(A.T)��Ih������������Ą���������λ��A��Bm�鱻���К�϶�ň��ĴŸБ����ȷ�ֵ����λ��T����=��t���؞��D(zhu��n)�ӽ��ٶȣ���λ��rad��s��
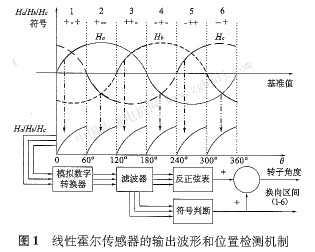
��ʽ(1)��֪���D(zhu��n)��λ�õ��κ�׃������ʹ���Ի���������ݔ����̖��׃����ˣ����ԏľ��Ի���������ݔ����̖�Ы@���D(zhu��n)��λ�á��D(zhu��n)�ٵ���Ϣ�����w���F(xi��n)˼·��D1��ʾ��
�ɈD1��֪�����ȣ���360 ��늚�Ǹ���(j��)�������Ҳ����� |