һ�N�oˢֱ��늄әC���ھ��D(zhu��n)�ٹ�Ӌ����
�����������|��
(�����I���I(y��)��W���V�|����518055)
ժҪ���о���һ�N�oˢֱ��늄әC���ھ��D(zhu��n)�ٹ�Ӌ�����������һ�N��HaIl�������{(di��o)�ٵĻ��A(ch��)�ϣ�ͨ�^һ�N�ھ�������늄әC�ٶ��M�й�Ӌ��һ�N����������Ì����C��ԓ�����Ŀ����ԡ�
�P(gu��n)�I�~���oˢֱ��늄әC��Hall���������ٶȹ�Ӌ
0�� ��
�oˢֱ��늄әC�đ�(y��ng)���I(l��ng)��ʮ�֏V�����䌒�ӑB(t��i)�������߾����ٶȿ��Ƶ��P(gu��n)�I�h(hu��n)��(ji��)�����ٶșz�y�������ڵ͉��µ��ٶșz�y�t�Ǹ����P(gu��n)�I�ġ���������Ĝy���h(hu��n)��(ji��)��һ�N�ھ��ķ�ʽ���c���y(t��ng)�Ļ��ڹ�늾��a�������D(zhu��n)׃������������ȣ��@�N���������ϵ�y(t��ng)�������Y(ji��)��(g��u)���c�y�ٰl(f��)늙C������@�p����һ���y�ٰl(f��)늙C�b�á��ɴ˿��Կ���������һ�N���ο����֜ʴ_�Ĝy�ٷ�����ʮ�ֱ�Ҫ�ġ�
1�oˢֱ��늄әC�ٶȿ���ԭ��
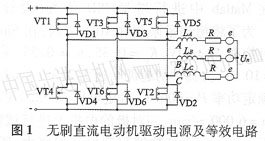
���ڶ����@�M���������ͽӷ��ğoˢֱ��늄әC��ÿ���@�M���Ե�Ч����衢늸кͷ�늄ӄݴ�(li��n)���ɣ���������ȫ��ʽ��׃�������(q��)���Դ�����·��늙C��Чģ����Dl��ʾ��
����ڷ����������¼ٶ���
(1)�����@�M��ȫ���Q����϶�ň��鷽��������������D(zhu��n)�Ӵň��ֲ�����
(2)�����X�ۡ��Q���^�̺�늘з���(y��ng)��Ӱ푣�
(3)늘��@�M�ڶ��Ӄ�(n��i)������c�B�m(x��)�ֲ���
(4)��·��ͣ���Ӌ�u���ʹŜ��pʧ��
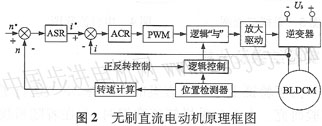
�oˢֱ��늄әC�Ļ�������ԭ�����O(sh��)늄әC���w��늘��@�M�����������B�ӣ�λ�Â������c늄әC���wͬ�S�������·��λ����̖�M��߉׃�Q��a(ch��n)���(q��)����̖���(q��)����̖��(j��ng)�(q��)���·���x�Ŵ�������׃���Ĺ����_�P(gu��n)�ܣ�ʹ늙C�ĸ����@�M��һ��������������Ӻϳɴň��ڿ��g�����B�m(x��)���D(zhu��n)�ģ�����һ�N���Sʽ���D(zhu��n)�ň���ÿ�����M����60o늽Ƕȡ��D(zhu��n)���ڿ��gÿ�D(zhu��n)�^60o늽Ƕȣ������@�M���M��һ�ΓQ�������Ӻϳɴň��ĴŠ�B(t��i)�Ͱl(f��)��һ���S׃����Ҋ��늙C�����N�Š�B(t��i)��ÿһ��B(t��i)�Ѓ�����ͨ��ÿ���@�M�Č�ͨ�r�g����(y��ng)���D(zhu��n)�����D(zhu��n)120o늽Ƕȡ��҂��џoˢֱ��늄әC���@�N������ʽ�Q�������ͨ������������B(t��i)���@����õ�һ�N������ʽ��
����������D(zhu��n)�ٹ�Ӌ�����Æ�Ƭ�C��EEPROM�Ĵ������D(zhu��n)�ٔ�(sh��)��(j��)�M�вɼ����惦��Ȼ�ɼ����Ĕ�(sh��)��(j��)�M������(y��ng)��̎���õ��D(zhu��n)��������ԓ�������Ρ��ײ������D(zhu��n)����������ȡ����늄әC�Ľ�ģ��������ʮ���P(gu��n)�I�ġ�
2�ھ��D(zhu��n)�ٿ��Ʋ���
2��1Ӳ���O(sh��)Ӌ
�����܉��늙C�����@�ø���Ĝy����Ϣ����늙C��һ���O׃���˶����O�������ʹ�õ�늙C��4���O��������Hall֮�g����λ���120o��늙C���D(zhu��n)һ�܌��a(ch��n)����·��λ�������120o��Hall�}�_��̖�����Æ�Ƭ�C�е��������@��Ԫ���ɫ@��늙C�Ĝy����̖������ÿ�β��@�õ���6���Š�B(t��i)����(y��ng)���D(zhu��n)�ٞ�1��4Ȧ���@�ӿ�������ÿ�βɘӵĽY(ji��)����һ���O�ɘӽY(ji��)�������ܼ����y�õĽY(ji��)�����ӽ��挍ֵ���ڬF(xi��n)�е�늙C���ư���A(ch��)��߀��Ҫһ�������·��������EPPROM�еĔ�(sh��)��(j��)���ͳ�����
2��2ܛ���O(sh��)Ӌ
�چ�Ƭ�C�������������@��Ԫ���D(zhu��n)���M�Мy�����@�������@��Ԫ���nj��ߵ��ƽ���a(ch��n)���Д࣬���nj���һ�����@��Ԫ���v��ÿ���@һ���D(zhu��n)����̖������1��8Ȧ����ÿӋһ�Δ�(sh��)����4��s�������ɴ˿���Ӌ����D(zhu��n)�ٌ���(y��ng)��Ӌ��(sh��)���е�Ӌ��(sh��)����(sh��)��N=
��Ŀ���Ǟ��˜p�ن�Ƭ�C�е��\������
ʽ�У�N�������@Ӌ��(sh��)���е�Ӌ��(sh��)����(sh��)��
n����늙C�D(zhu��n)�١�
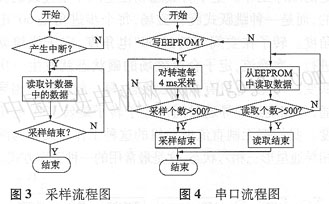
���x�õ��D(zhu��n)�م���(sh��)���浽EEPROM�У����ô��ڌ�늙C�D(zhu��n)�م���(sh��)�x�˵�Pc�C�У�����Madab�Ќ����M���ٶ��������D(zhu��n)�������̈D��D3�͈D4��ʾ��ͨ�^ԓ�^�̵IJ����������늄әC���D(zhu��n)��������
3���Y(ji��)��������
������C�����y�ٷ�������Ч�ԣ������M���ˌ���о��������ڲɘ��D(zhu��n)�ٔ�(sh��)��(j��)�r���������S�C�_�ӣ�����ÿ�θɔ_���Dz�ͬ�ģ�������Ҫ�����M�ж�Μy�� |