�Б�(y��ng)늄�(d��ng)�C(j��)ʸ������ϵ�y(t��ng)���]�h(hu��n)�D(zhu��n)�ٹ�Ӌ(j��)����
��˼�A����Ӣ�����V��
(1�����I���I(y��)��W(xu��)�������������I150001��2���B��ͨ��W(xu��)���|�����B116028)
ժҪ���齵��Ӌ(j��)��������ߟo�ٶȂ������Б�(y��ng)늄�(d��ng)�C(j��)���D(zhu��n)�ٹ�Ӌ(j��)�ٶ��c��朵Ķ����(zh��n)�_�ԣ����ڸБ�(y��ng)늄�(d��ng)�C(j��)������ٶ�ģ�ͣ��O(sh��)Ӌ(j��)��һ�N���ε��]�h(hu��n)�ٶȹ�Ӌ(j��)���������ڟo�ٶȂ������Б�(y��ng)늄�(d��ng)�C(j��)ʸ������ϵ�y(t��ng)�е��ٶȹ�Ӌ(j��)����(sh��)�(y��n)�Y(ji��)���(y��n)�C��ԓ�����ڸБ�(y��ng)늄�(d��ng)�C(j��)����ϵ�y(t��ng)��(y��ng)���е���Ч�ԡ�
�P(gu��n)�I�~���Б�(y��ng)늄�(d��ng)�C(j��)������ٶ�ģ�ͣ��]�h(hu��n)�ٶȹ�Ӌ(j��)���o�ٶȂ�����
0�� ��
�Б�(y��ng)늄�(d��ng)�C(j��)ʹ�þS�o(h��)���㣬�\(y��n)�пɿ����r(ji��)��ͣ�����ڹ��I(y��)�I(l��ng)��@���ˏV���đ�(y��ng)�á����ڸБ�(y��ng)늄�(d��ng)�C(j��)�Ŀ��Ʋ����У����ڟo�ٶȂ�������ʸ�����Ƽ��g(sh��)�ֵõ��˴������о���ʹ�á��ڟo�ٶȂ��������g(sh��)�У��ٶȹ�Ӌ(j��)�ĺÉ�ֱ��Ӱ푽����o�ٶȂ���������ϵ�y(t��ng)�����ܣ�������ɞ�һ��(g��)�о����c(di��n)��
�S���W(xu��)�߲����˶�N늙C(j��)�D(zhu��n)�ٱ��R(sh��)�������M���ܵ�����D(zhu��n)�ٹ�Ӌ(j��)�ľ��Ⱥ��ٶȡ�����늉������ģ�ͅ������m��(y��ng)����(MRAs)����ڼ��e�֭h(hu��n)��(ji��)�����R(sh��)��(zh��n)�_�Բ���ܶ������Ӱ푣����ٕr(sh��)����(w��n)�����īI(xi��n)[2]����ø��l�C����̖ע�뷨��Ӌ(j��)�ٶȣ�����ߵ������ܣ�����ؓ(f��)�dӰ��^���īI(xi��n)[3]ʹ����(j��ng)�W(w��ng)�j(lu��)�M(j��n)���D(zhu��n)�ٹ�Ӌ(j��)����Ӌ(j��)���ȸߣ��������ܺã�����(j��ng)�W(w��ng)�j(lu��)��(sh��)�F(xi��n)��(f��)�s�ČW(xu��)��(x��)�㷨�ஔ(d��ng)�M(f��i)�r(sh��)�����������ڌ�(sh��)�r(sh��)��Ҫ��ߵ�ʸ������ϵ�y(t��ng)�еđ�(y��ng)�á����ڿ������V�������D(zhu��n)�ٹ�Ӌ(j��)�����܉���Ч�����S�C(j��)�ɔ_�͜y������Ӱ푣���������늙C(j��)����(sh��)׃����Ӱ푣�����Ӌ(j��)�����ܴ������Ϸ��������������һ�N���ε��ٶȹ�Ӌ(j��)��������ԭ�����Σ�Ӌ(j��)����С���������ڼ��e�֭h(hu��n)��(ji��)�����ij�ֵ��ֱ��Ư�ƵȆ��}�����IJ�����һ�N�������Ʒ�ֵ���õĽ�(j��ng)�ĵķe�����팦����M(j��n)���^�y����Ч������˴�机��ٶȹ�Ӌ(j��)�Ĝ�(zh��n)�_�ԡ�
1�Б�(y��ng)늄�(d��ng)�C(j��)ģ��
�����D(zhu��n)����(bi��o)ϵ�£��Б�(y��ng)늄�(d��ng)�C(j��)�Ĕ�(sh��)�W(xu��)ģ�͞飺
Rs��Ls��Rr��Lr��Lm�քe�鶨����衢����늸С��D(zhu��n)����衢�D(zhu��n)��늸��Լ����У�isd��isq����rd����rq�քe��d��q�S�ϵĶ���������D(zhu��n)�Ӵ�朣���T��ͬ���D(zhu��n)�٣���r��늙C(j��)�D(zhu��n)�٣���s���D(zhu��n)���1-��r=��s���Ҟ�늄�(d��ng)�C(j��)©��ϵ��(sh��)
Tr���D(zhu��n)��늴ŕr(sh��)�g����(sh��)��
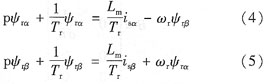
�����ڛ]��늉��������ėl���¹�Ӌ(j��)�D(zhu��n)�Ӵ�机��ٶȣ�����ʽ(1)�����Եõ�һ��(g��)�oֹ����(bi��o)ϵ(������)�еĸБ�(y��ng)늄�(d��ng)�C(j��)����ٶ�ģ�ͣ�
��ԓģ���У�늙C(j��)���ͨ�^��������ʽ�ķe�ց��@�ã���Ҫ���nj�(sh��)�y��������D(zhu��n)����̖��
2�]�h(hu��n)��机��ٶȹ�Ӌ(j��)
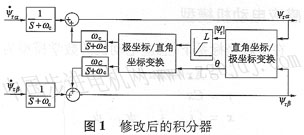
�ڌ�(sh��)�H��(y��ng)����Ҫ��(sh��)�F(xi��n)һ��(g��)�e���Ƿdz����y�ģ���?y��n)�һ��(g��)�_�h(hu��n)�ķe����ͨ������ֱ��Ư�ƺ�һЩ��ʼ�����}�������еĴ�机��ٶ�ͨ�^һ��(g��)���εĹ�Ӌ(j��)�㷨���@�ã������õķe������һ��(g��)�Է����h(hu��n)��(ji��)���@�ӿ��������_�h(hu��n)�e����������ֱ��Ư�ƵȆ��}��ԓ���M(j��n)�ͷe������ԭ����D��Dl��ʾ��
�D�У��e������ݔ����ǰ���ͷ����ɲ��ֽM�ɡ���(d��ng)ݔ����̖�l���h(yu��n)�h(yu��n)���ڽ�ֹ�l�ʦ�e�r(sh��)�������h(hu��n)��(ji��)�����挢څ�����㣬�˕r(sh��)�e������ݔ���H��ǰ�����ֽM�ɣ���(d��ng)ݔ����̖�l���^�͕r(sh��)�������h(hu��n)��(ji��)����Ҫ���þ�������ֱ��Ư�Ɔ��}���ٶ��e������ݔ���x��ݔ����y����һ��(g��)��ֱ����̖�ӵ�ݔ���ϣ��t�e������****ݔ���飺
ֻҪ�m��(d��ng)�xȡ��
ֵL���Ϳ�����ȫ����ݔ���е�ֱ���ɷ֡������xȡ
���ɝM��Ҫ��
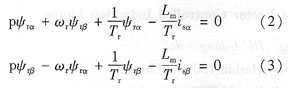
��ʽ(2)��ʽ(3)����������ʽ��
|