�Б�늄әC�D�ӕr�g�������R
�S־�䣬�ͬ�⣬��Լt�������v�������
(1���ϴ�W�������Lɳ410075��2��һ�ع��ɷ�����˾�������Lɳ410100)
ժҪ�����һ�N�·f�Ļ������m������^�y���ı��R�������c���y������늙C�O�c�����OӋ���������ꇲ�ͬ���ǣ�����������������Փ��Lyapun��v��������Փ��ͨ�^��⾀�Ծ�ꇲ���ʽ������^�y���ķ��������ꇡ�����Y��������ԓ�����ܜʴ_���R�Б�늄әC���D�ӕr�g�����������^���Ք��ԣ��^�ߵğo��ȼ������Ե����c��
�P�I�~�����m������^�y�����D�ӕr�g���������Ծ�ꇲ���ʽ
O�� ��
ʸ����������ͬ�������D������ϵ������������D�Ӵň������M�н������ֽ����������D����������քe��PI(�����e��)�{�����M�п��ơ�����������ںܴ�̶�����ه�ڜʴ_���R�D�Ӵ�朡�������R���ʴ_���o�����F�ʴ_�Ĵň����Ķ����²������_���F��������Ľ����Ӱ�ϵ�y�Ŀ������ԡ����ڌ��H����ϵ�y�У��D�Ӵ�朵ı��R���D�Ӆ��������У���늙C�D�Ӆ������D�ӕr�g�����S늙C�ض��������l��׃������������D�ӕr�g���������ھ����R�c�{������Ӱ�ϵ�y�Ŀ������ܡ�
�ܶ��īI����˱��R�D�ӕr�g�����ķ������īI[1��3]����MRAs���D�ӕr�g�����M�б��R����������ͨ�^һͺ����z�y����늉��������C�����������@һ����ͨ�����Ǹ����oؓ�dԇ�õ���������ϵ�y�ď��s�ԡ��īI[4-6]�քe����MRAs���ò�ͬ�Ĕ��Wģ�ͻ��`����̖���R�D�ӕr�g�����������������ý��A�Ġ�B���̣��]��ȫ�淴ӳϵ�y��B��Ϣ���īI[7]���^�y��ͬ�r���D�١��D�ӕr�g�����M�б��R���������^�y������������ͨ���x���㣬�Ķ�ʹϵ�yȱ�����`���헡�
���Ļ��ڴ�朠�B�^�y�����D�ӕr�g�����M�б��R�����·f֮̎�ڷ���������xȡ�ϡ�����������������Փ��Lvӡunov��������Փ��ͨ�^M atlab6 5��LMI�����䣬��⾀�Ծ�ꇲ���ʽ(LMI)���^֮���y�ĘO�c���÷������к��οɿ���������r�¶��ܱ��Cϵ�y�����Ե����c��
l�Б�늄әC���Wģ��
�ڃ����oֹ��������ϵ�£������ �B���́����Б�늄әC��
ʽ�У�x=[is��r]T��is�鶨�������is=[is��is��]T����r���D�Ӵ�朣���r=[��r����r��]T����r��늙C���ٶȣ�us�鶨��늉���
Rs��Rr�鶨�ӡ��D����裬Ls��Lr�鶨�ӡ��D���ԸУ�Lm�黥�У��Ҟ�©��ϵ������=
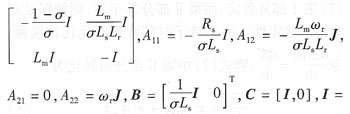
 ���D�ӕr�g���������� 2�D�ӕr�g�������Rȫ�A��B�^�y������ʽ��ʾ��
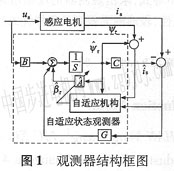
���У��Ϙ�^��ʾ��Ӌֵ��G�鷴�������ꇡ��D�ӕr�g�����^�y���Y���D��D1��ʾ��
2 1���m�����xȡ
�O
��ʽ(1)��ʽ(3)���p�����`��̣�
�OLyapunov�����飺
��ʽ(5)���ã�
��ʽ(4)����ʽ(6)�ã�
|